
【導(dǎo)讀】本篇節(jié)選自論文《云計(jì)算在分布式傳感器輻射源識(shí)別中的應(yīng)用》,發(fā)表于《中國(guó)電子科學(xué)研究院學(xué)報(bào)》第9卷第3期。下面讓我們一起開(kāi)始學(xué)習(xí)云計(jì)算在分布式傳感器輻射源識(shí)別中的應(yīng)用吧!
針對(duì)輻射源識(shí)別中的參數(shù)模糊交疊問(wèn)題,提出了基于云計(jì)算的輻射源樣本隸屬度獲取方法,結(jié)合分布式傳感器的優(yōu)勢(shì),構(gòu)建云計(jì)算在分布式傳感器輻射源識(shí)別中的應(yīng)用系統(tǒng)。首先介紹云計(jì)算的有關(guān)概念,其次分析分布式傳感器的特征,再由云計(jì)算區(qū)間型和離散型輻射源樣本隸屬度,并進(jìn)行單傳感器時(shí)域融合和分布式傳感器信息融合,利用判決規(guī)則完成決策。仿真結(jié)果說(shuō)明基于云計(jì)算的輻射源識(shí)別率高。
引 言
信息系統(tǒng)在信息作戰(zhàn)中發(fā)揮了巨大作用,對(duì)海軍航空兵來(lái)說(shuō),要實(shí)現(xiàn)對(duì)敵核心要害的精確打擊,離不開(kāi)準(zhǔn)確的信息偵察,信息偵察的一個(gè)重要步驟就是對(duì)敵輻射源的信息識(shí)別,只有準(zhǔn)確的識(shí)別敵核心要害武備,才能為后續(xù)的精確打擊提供戰(zhàn)術(shù)支援。當(dāng)前敵雷達(dá)輻射源技術(shù)參數(shù)出現(xiàn)很大程度模糊,各型雷達(dá)參數(shù)重疊、交錯(cuò),采用傳統(tǒng)五參數(shù)(RF、TOA、DOA、PA、PW)法識(shí)別雷達(dá)輻射源難度加大,這給信息作戰(zhàn)、賽博作戰(zhàn)中的信息偵察帶來(lái)嚴(yán)峻挑戰(zhàn)。對(duì)于輻射源識(shí)別問(wèn)題,目前的研究方法有基于模糊集的方法、基于神經(jīng)網(wǎng)絡(luò)的方法、基于灰色關(guān)聯(lián)的方法、基于粗糙集的方法、基于支撐向量機(jī)的方法等。上述方法在輻射源參數(shù)存在模糊及交疊時(shí),識(shí)別效果較差。
云計(jì)算能更好地處理模糊和交疊參數(shù)問(wèn)題,已有研究將云模型用于輻射源識(shí)別中,如將云模型用于平臺(tái)目標(biāo)識(shí)別,或?qū)⒃颇P陀糜谥С窒蛄繖C(jī)輻射源識(shí)別中,但其具體的計(jì)算辦法還不完善,本文考慮將云計(jì)算用于分布式傳感器輻射源信息識(shí)別中,提出基于云計(jì)算的識(shí)別算法。首先介紹云計(jì)算理論,其次給出分布式傳感器輻射源信息識(shí)別的概念,將云計(jì)算應(yīng)用于輻射源識(shí)別中,建立基于云計(jì)算的輻射源隸屬度獲取模型,給出本文識(shí)別算法及流程圖,最后結(jié)合輻射源參數(shù)數(shù)據(jù)庫(kù)進(jìn)行識(shí)別仿真對(duì)比實(shí)驗(yàn),仿真結(jié)果表明云計(jì)算相比于其他識(shí)別算法能獲得更高和更穩(wěn)定的輻射源識(shí)別效果。
1.云計(jì)算
云計(jì)算是院士李德毅提出的一種定性定量不確定性轉(zhuǎn)換模型算法,用自然語(yǔ)言值表示定性與定量間不確定性轉(zhuǎn)換,能處理模糊集理論中的模糊性和概率論中的隨機(jī)性問(wèn)題,通過(guò)期望Ex(Expected value)、熵En(Entropy)、超熵He(Hyper entropy)3個(gè)數(shù)字參數(shù)表征一個(gè)定性概念,從而實(shí)現(xiàn)定性定量轉(zhuǎn)換。期望Ex表示數(shù)域空間定性概念量化樣本點(diǎn);熵En表示論域空間定性概念的模糊度,還可表示定性概念的云滴出現(xiàn)的概率;超熵He表示論域空間中定性概念的云滴的凝聚性。
云計(jì)算中的正向云發(fā)生器可實(shí)現(xiàn)輻射源特征參數(shù)從定性到定量的轉(zhuǎn)換,由云的數(shù)字特征產(chǎn)生云滴就能實(shí)現(xiàn)定性定量轉(zhuǎn)換,正向云發(fā)生器如圖1。

圖1 正向云發(fā)生器
正向云生成算法是先生成以Ex為期望,En為均方差的正態(tài)隨機(jī)數(shù)x;再生成以En為期望,He為均方差的正態(tài)隨機(jī)數(shù)En´;最后計(jì)算隸屬度:
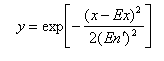
那么(x,y)就是生成的云滴,式中x是定性概念的一個(gè)隨機(jī)數(shù),y是x屬于定性概念的準(zhǔn)確度。
2.分布式傳感器輻射源識(shí)別
隨著傳感器技術(shù)的飛速發(fā)展,傳統(tǒng)的單傳感器獲取的敵輻射源信息往往是不確定的,特別是戰(zhàn)場(chǎng)信息空間中的電磁空間和賽博空間尤為突出。信息化戰(zhàn)爭(zhēng)中,敵我雙方大量的信息裝備應(yīng)用于電磁空間和賽博空間,形成了十分復(fù)雜的戰(zhàn)場(chǎng)電子環(huán)境,而其中的裝備技術(shù)參數(shù)更加的多變,使得偵察信息異常復(fù)雜和難以分析,而分布式傳感器能提取獨(dú)立、互補(bǔ)的輻射源信息,獲得輻射源更為詳盡準(zhǔn)確的信息情報(bào),這為輻射源識(shí)別奠定良好的基礎(chǔ)。此外由分布式傳感器進(jìn)行信息融合(DSIF:Distributed Sensors Information Fusion),可消除單傳感器間可能存在的矛盾,進(jìn)一步降低輻射源識(shí)別不確定性,同時(shí)產(chǎn)生新的有價(jià)值信息,有利于提高輻射源識(shí)別效果。
3.云計(jì)算用于分布式傳感器輻射源識(shí)別中
通過(guò)上述分析,云計(jì)算能很好地處理模糊性和不確定性問(wèn)題,并能將定性問(wèn)題轉(zhuǎn)化為定量問(wèn)題,這給具有模糊參數(shù)的輻射源識(shí)別問(wèn)題提供了一個(gè)新的思路,同時(shí)分布式傳感器信息融合能克服參數(shù)的沖突,進(jìn)一步提高輻射源識(shí)別率,因此考慮將云計(jì)算同分布式傳感器輻射源識(shí)別結(jié)合起來(lái)進(jìn)行輻射源識(shí)別。首先利用云計(jì)算得到輻射源隸屬度,而后建立本文識(shí)別算法及流程,最后進(jìn)行仿真驗(yàn)證。
基于云計(jì)算的識(shí)別算法及流程
由上述云計(jì)算輻射源隸屬度的過(guò)程,采用云計(jì)算對(duì)雷達(dá)數(shù)據(jù)庫(kù)中區(qū)間型及離散型參數(shù)變量進(jìn)行建模,計(jì)算輻射源樣本每個(gè)參數(shù)相對(duì)數(shù)據(jù)庫(kù)相應(yīng)參數(shù)的隸屬度,根據(jù)平均權(quán)值法計(jì)算各參數(shù)的總隸屬度,將該隸屬度作為D-S理論中的BPAF,完成分布式傳感器時(shí)域及空域信息融合,最后由決策規(guī)則完成輻射源識(shí)別?;谠朴?jì)算的分布式傳感器輻射源識(shí)別算法如下:
(1)構(gòu)建輻射源參數(shù)數(shù)據(jù)庫(kù);
(2)由云計(jì)算對(duì)數(shù)據(jù)庫(kù)中區(qū)間型及離散型參數(shù)建模并計(jì)算各類輻射源的云數(shù)字特征期望、熵和超熵;
(3)利用平均權(quán)值計(jì)算輻射源樣本參數(shù)隸屬度并將其作為基本概率賦值BPAF;
(4)完成單傳感器時(shí)域信息融合;
(5)完成分布式傳感器信息融合;
(6)依據(jù)判決規(guī)則進(jìn)行決策,給出輻射源識(shí)別結(jié)果。
由識(shí)別步驟,構(gòu)設(shè)輻射源識(shí)別流程系統(tǒng)如圖2。
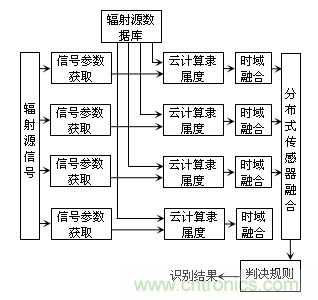
圖2 輻射源識(shí)別流程
4.數(shù)據(jù)仿真
針對(duì)本文提出的基于云計(jì)算的分布式傳感器輻射源識(shí)別算法,設(shè)計(jì)兩個(gè)實(shí)驗(yàn)來(lái)驗(yàn)證本文識(shí)別算法的性能和識(shí)別系統(tǒng)的合理性。設(shè)輻射源數(shù)據(jù)庫(kù)中有4部雷達(dá)數(shù)據(jù)R1、R2、R3、R4,參數(shù)主要有脈寬(PW)、脈沖重復(fù)間隔(PRI)、載頻(RF),參數(shù)包括區(qū)間型和離散型數(shù)字變量。
設(shè)空間存在雷達(dá)R2,利用3部傳感器(ESM)各4個(gè)測(cè)量周期獲得輻射源參數(shù)樣本,所得參數(shù)樣本均附加有5%的測(cè)量誤差,由云計(jì)算輻射源樣本參數(shù)隸屬度,并作為D-S理論的BPAF,得到輻射源樣本隸屬度表1。
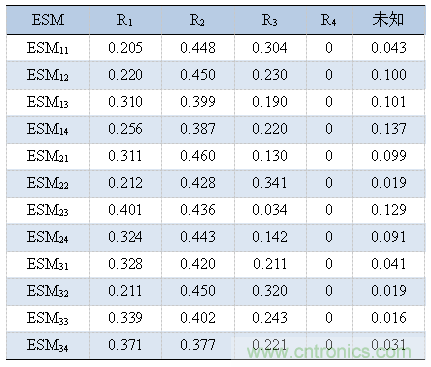
表1 輻射源樣本隸屬度
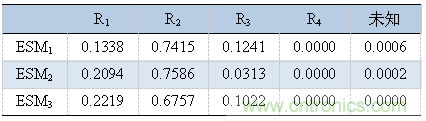
表2 時(shí)域融合單傳感器時(shí)域信息融合得表2。

表3 分布式融合分布式傳感器信息融合得表3。
另設(shè)空間中存在4部雷達(dá)輻射源,對(duì)數(shù)據(jù)庫(kù)中4部雷達(dá)參數(shù)附加噪聲構(gòu)成輻射源樣本進(jìn)行識(shí)別仿真,生成800個(gè)輻射源樣本數(shù)據(jù),每部雷達(dá)200個(gè)樣本,樣本測(cè)量誤差服從零均值高斯分布。圖3給出了本文云計(jì)算分布式傳感器輻射源識(shí)別率隨測(cè)量誤差的變化曲線。為了對(duì)比分析,圖4給出了采用支持向量機(jī)(SVM)的輻射源識(shí)別算法和本文算法的識(shí)別率曲線,識(shí)別率曲線是4部雷達(dá)的平均識(shí)別率,通過(guò)對(duì)比發(fā)現(xiàn),本文識(shí)別率更高。由判決規(guī)則進(jìn)行決策,依據(jù)專家經(jīng)驗(yàn)知識(shí)選擇(此處有公式?。。?,得到該輻射源為雷達(dá)R2。
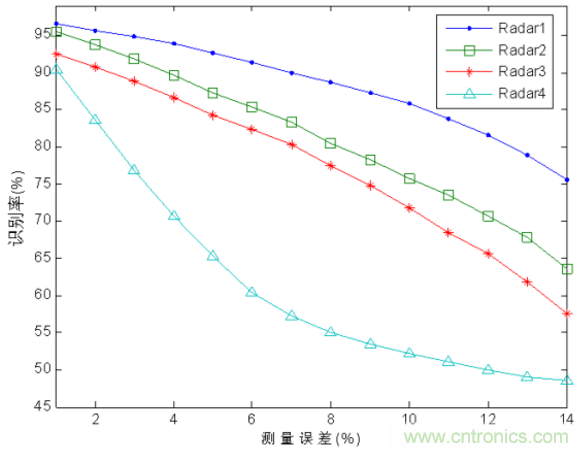
圖3-a 基于云計(jì)算的識(shí)別率曲線
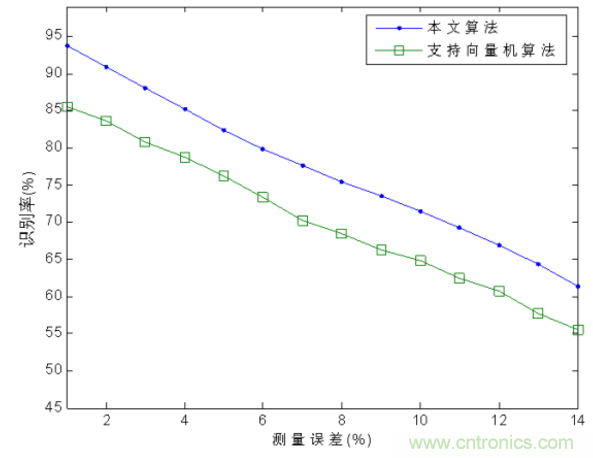
圖3-b 識(shí)別率對(duì)比曲線
表4給出了本文識(shí)別算法通過(guò)1500次Monte Carlo實(shí)驗(yàn)得到的輻射源識(shí)別率同其他識(shí)別算法的識(shí)別率對(duì)比。由表4可見(jiàn)本文識(shí)別算法正確識(shí)別率較高,優(yōu)于其他識(shí)別算法。
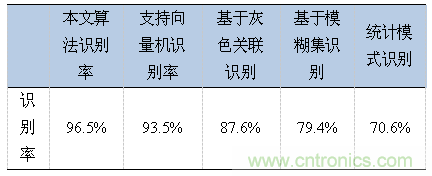
表4 輻射源識(shí)別率對(duì)比
由仿真實(shí)驗(yàn)結(jié)果知,云計(jì)算在分布式傳感器輻射源識(shí)別中具有以下優(yōu)點(diǎn):能很好地處理輻射源參數(shù)的模糊性和不確定性;云計(jì)算能對(duì)區(qū)間類型變量和離散型參數(shù)建模;結(jié)合傳感器時(shí)域融合、分布式傳感器信息融合能更進(jìn)一步提高輻射源識(shí)別率和識(shí)別的穩(wěn)健性;相比于其他識(shí)別算法,云計(jì)算能獲得更高的輻射源識(shí)別率。云計(jì)算的難點(diǎn)則是各類輻射源的數(shù)字特征期望、熵和超熵的計(jì)算。
結(jié) 語(yǔ)
本文將云計(jì)算用于分布式傳感器輻射源識(shí)別中,列出了相應(yīng)的輻射源識(shí)別算法并建立了識(shí)別流程圖。本文算法采用云計(jì)算對(duì)區(qū)間型參數(shù)建模,對(duì)離散型參數(shù)進(jìn)行評(píng)語(yǔ)集定性定量轉(zhuǎn)換,獲得輻射源隸屬度并將其作為基本概率賦值,通過(guò)傳感器時(shí)域融合、分布式傳感器信息融合,得到輻射源識(shí)別結(jié)果。實(shí)驗(yàn)證明,利用云計(jì)算進(jìn)行的輻射源識(shí)別比其他傳統(tǒng)識(shí)別算法識(shí)別效果好,并具有處理不確定問(wèn)題的魯棒性。
推薦閱讀:


