

【導(dǎo)讀】在許多情況下,機(jī)器人平臺的自主工作能力是一項(xiàng)極為重要的特性,即通過導(dǎo)航系統(tǒng)來監(jiān)視并控制機(jī)器人從一個(gè)位置移到下一位置的運(yùn)動(dòng)。管理位置和運(yùn)動(dòng)時(shí)的精度是實(shí)現(xiàn)高效自主工作的關(guān)鍵因素,MEMS(微機(jī)電系統(tǒng))陀螺儀可提供反饋檢測機(jī)制, 對優(yōu)化導(dǎo)航系統(tǒng)性能非常有用。
Adept MobileRobots項(xiàng)目經(jīng)理Seth Allen認(rèn)為,地面機(jī)器人系統(tǒng)必須常常處理"枯燥、骯臟、危險(xiǎn)"的工作。換言之,機(jī)器人系統(tǒng)通常用于人工介入成本過高、危險(xiǎn)過大或者效率過低的任務(wù)。在許多情況下,機(jī)器人平臺的自主工作能力是一項(xiàng)極為重要的特性,即通過導(dǎo)航系統(tǒng)來監(jiān)視并控制機(jī)器人從一個(gè)位置移到下一位置的運(yùn)動(dòng)。管理位置和運(yùn)動(dòng)時(shí)的精度是實(shí)現(xiàn)高效自主工作的關(guān)鍵因素,MEMS(微機(jī)電系統(tǒng))陀螺儀可提供反饋檢測機(jī)制, 對優(yōu)化導(dǎo)航系統(tǒng)性能非常有用。

圖1中所示的Seekur機(jī)器人系統(tǒng)就是一個(gè)采用先進(jìn)MEMS器件來改善導(dǎo)航性能的自主系統(tǒng)。

圖1. Adept MobileRobots公司的Seekur系統(tǒng)。
# 機(jī)器人導(dǎo)航概述
機(jī)器人的移動(dòng)通常是從管理機(jī)器人總體任務(wù)進(jìn)度的中央處理器發(fā)出位置變化請求時(shí)開始的。導(dǎo)航系統(tǒng)通過制定行程計(jì)劃或軌跡以開始執(zhí)行位置變化請求。行程計(jì)劃需考慮可用路徑、已知障礙位置、機(jī)器人能力及任何相關(guān)的任務(wù)目標(biāo)。(例如,對于醫(yī)院里的標(biāo)本遞送機(jī)器人,遞送時(shí)間非常關(guān)鍵。)行程計(jì)劃被饋入控制器,后者生成傳動(dòng)和方向配置文件以便進(jìn)行導(dǎo)航控制。這些配置文件可根據(jù)行程計(jì)劃執(zhí)行動(dòng)作和進(jìn)程。該運(yùn)動(dòng)通常由若干檢測系統(tǒng)進(jìn)行監(jiān)控,各檢測系統(tǒng)均產(chǎn)生反饋信號;反饋控制器將信號組合并轉(zhuǎn)換成更新后的行程計(jì)劃和條件。圖2是一般導(dǎo)航系統(tǒng)的基本框圖。
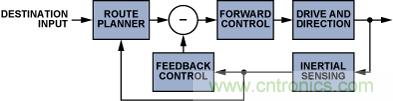
圖2. 一般導(dǎo)航系統(tǒng)框圖。
開發(fā)導(dǎo)航系統(tǒng)的關(guān)鍵步驟始于充分了解每種功能,尤其需要重視其工作目標(biāo)和限制。各項(xiàng)功能通常都有一些明確界定且易于執(zhí)行的因素,但也會(huì)提出一些需要加以處理的具有挑戰(zhàn)性的限制。某些情況下,這可能是一個(gè)反復(fù)試探的過程,即識別和處理限制的同時(shí)又會(huì)帶來新的優(yōu)化機(jī)遇。通過一個(gè)實(shí)例可以清楚說明這一過程。
# Adept MobileRobots Seekur機(jī)器人
Adept MobileRobots Seekur2是一款采用慣性導(dǎo)航系統(tǒng) (INS)的自主機(jī)器人,參見圖3。該車輛具有4輪傳動(dòng)系統(tǒng),每個(gè)車輪均有獨(dú)立轉(zhuǎn)向和速度控制能力,可在任何水平方向上靈活地移動(dòng)平臺。此能力對于倉庫交貨系統(tǒng)、醫(yī)院標(biāo)本/補(bǔ)給品遞送系統(tǒng)和軍隊(duì)增援系統(tǒng)等新興應(yīng)用中的機(jī)器人車輛非常有用。
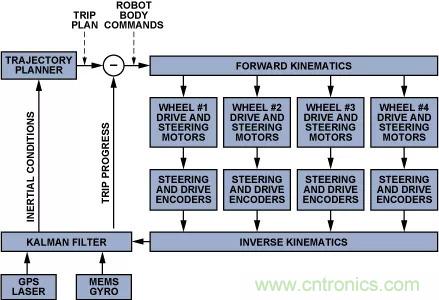
圖3. Adept MobileRobots Seekur導(dǎo)航系統(tǒng)。
正向控制
機(jī)器人本體命令,即主要誤差信號, 代表軌跡規(guī)劃器提供的行程計(jì)劃與反饋檢測系統(tǒng)提供的行程進(jìn)度更新信息之間的差異。這些信號被饋入逆向運(yùn)動(dòng)學(xué)系統(tǒng),后者將機(jī)器人本體命令轉(zhuǎn)換成每個(gè)車輪的轉(zhuǎn)向和速度配置文件。這些配置文件使用阿克曼轉(zhuǎn)向關(guān)系,進(jìn)行計(jì)算,整合了輪胎直徑、表面接觸面積、間距和其他重要幾何特性。利用阿克曼轉(zhuǎn)向原理和關(guān)系,上述機(jī)器人平臺可創(chuàng)建以電子方式鏈接的轉(zhuǎn)向角度配置文件,類似于許多汽車轉(zhuǎn)向系統(tǒng)中使用的機(jī)械齒輪-齒條系統(tǒng)。由于這些關(guān)系是以遠(yuǎn)程方式整合在一起的,不需要以機(jī)械方式鏈接車軸,因而有助于最大程度減小磨擦和輪胎滑移,減少輪胎磨損和能量損耗,實(shí)現(xiàn)簡單的機(jī)械鏈接無法完成的運(yùn)動(dòng)。
車輪驅(qū)動(dòng)和轉(zhuǎn)向系統(tǒng)
每個(gè)車輪均有一個(gè)驅(qū)動(dòng)軸,通過變速箱以機(jī)械方式連接至驅(qū)動(dòng)馬達(dá),同時(shí)通過另一個(gè)變速箱耦合至光學(xué)編碼器,即測程反饋系統(tǒng)的輸入端。轉(zhuǎn)向軸 將車軸耦合至另一伺服馬達(dá),該馬達(dá)負(fù)責(zé)確立車輪的轉(zhuǎn)向角度。轉(zhuǎn)向軸還將通過變速箱耦合至第二個(gè)光學(xué)編碼器,也即測程反饋系統(tǒng)的另一個(gè)輸入端。
反饋檢測和控制
導(dǎo)航系統(tǒng)使用一個(gè)增強(qiáng)的Kalman filter3,通過結(jié)合多個(gè)傳感器的數(shù)據(jù)來估算行程圖上機(jī)器人的姿態(tài)。Seekur上的測程數(shù)據(jù)從車輪牽引和轉(zhuǎn)向編碼器(提供轉(zhuǎn)換)和MEMS陀螺儀(提供旋轉(zhuǎn))獲得。
測程
測程反饋系統(tǒng)利用光學(xué)編碼器對驅(qū)動(dòng)和轉(zhuǎn)向軸旋轉(zhuǎn)的測量結(jié)果來估算機(jī)器人的位置、駛向和速度。在光學(xué)編碼器中,用一個(gè)碟片阻擋內(nèi)部光源,或者通過數(shù)千個(gè)微小窗口讓光源照射在光傳感器上。碟片旋轉(zhuǎn)時(shí),便會(huì)產(chǎn)生一系列電脈沖,這些脈沖通常被饋入計(jì)數(shù)器電路。每旋轉(zhuǎn)一圈的計(jì)數(shù)次數(shù)等于碟片內(nèi)的槽孔數(shù)目,因此可從編碼器電路的脈沖計(jì)數(shù)計(jì)算旋轉(zhuǎn)數(shù)(包括小數(shù))。圖4提供了將驅(qū)動(dòng)軸旋轉(zhuǎn)計(jì)數(shù)轉(zhuǎn)換成線性位移 (位置) 變化的圖形參考和關(guān)系。
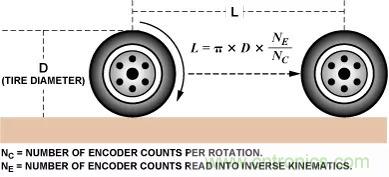
圖4. 測程線性位移關(guān)系。
每個(gè)車輪的驅(qū)動(dòng)軸和轉(zhuǎn)向軸編碼器測量結(jié)果在正向運(yùn)動(dòng)學(xué)處理器中用阿克曼轉(zhuǎn)向公式進(jìn)行組合,從而產(chǎn)生駛向、偏轉(zhuǎn)速率、位置和線速度等測量數(shù)據(jù)。
該測量系統(tǒng)的優(yōu)點(diǎn)在于其檢測功能直接與驅(qū)動(dòng)和轉(zhuǎn)向控制系統(tǒng)相結(jié)合,因此可精確得知驅(qū)動(dòng)和轉(zhuǎn)向控制系統(tǒng)的狀態(tài)。不過,除非可參考一組實(shí)際坐標(biāo),否則該測量系統(tǒng)在車輛實(shí)際速度和方向方面的精度有限。主要限制(或誤差源)在于輪胎幾何形狀一致性(圖4中D的精度和波動(dòng)),以及輪胎與地面之間的接觸中斷。輪胎幾何形狀取決于胎冠一致性、胎壓、溫度、重量及在正常機(jī)器人使用過程中可能發(fā)生變化的所有條件。輪胎滑移則取決于偏轉(zhuǎn)半徑、速度和表面一致性。
位置檢測
Seekur系統(tǒng)使用多種距離傳感器。對于室內(nèi)應(yīng)用,該系統(tǒng)采用270°激光掃描器為其環(huán)境構(gòu)建映射圖。激光系統(tǒng)通過能量返回模式和信號返回時(shí)間測量物體形狀、尺寸及與激光源的距離。在映射模式中,激光系統(tǒng)通過將工作區(qū)內(nèi)多個(gè)不同位置的掃描結(jié)果組合,描述工作區(qū)特性(圖5)。這樣便產(chǎn)生了物體位置、尺寸和形狀的映射圖,作為運(yùn)行時(shí)掃描的參考。激光掃描器功能結(jié)合映射信息使用時(shí),可提供精確的位置信息。該功能如果單獨(dú)使用,會(huì)存在一定限制,包括掃描時(shí)需要停機(jī)以及無法處理環(huán)境變化等等。在倉庫環(huán)境中,人員、叉車、托盤搬運(yùn)車及許多其他物體常常會(huì)改變位置,這可能影響到達(dá)目的地的速度,以及到達(dá)正確目的地的精度。
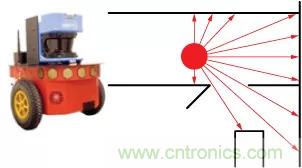
圖5. 激光映射。
對于室外應(yīng)用,Seekur使用全球定位系統(tǒng) (GPS)進(jìn)行位置測量(圖6)。全球定位系統(tǒng)通過至少四個(gè)衛(wèi)星的無線電信號傳播時(shí)間對地球表面上的位置進(jìn)行三角測量,精度可達(dá)±1 m以內(nèi)。不過,這些系統(tǒng)難以滿足無阻擋的要求,可能受建筑、樹木、橋梁、隧道及許多其他類型的物體影響。某些情況下,室外物體位置和特性已知("城市峽谷"), 則在GPS運(yùn)行中斷時(shí)也可使用雷達(dá)和聲納來協(xié)助進(jìn)行位置估算。即便如此,當(dāng)存在動(dòng)態(tài)條件時(shí),例如汽車經(jīng)過或正在施工,效果常常會(huì)受到影響。
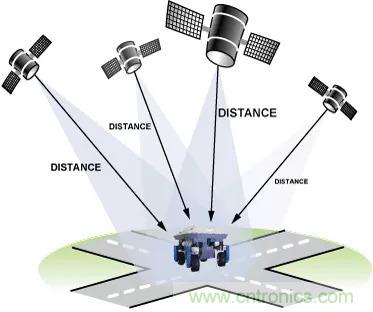
圖6. GPS位置檢測。
MEMS 角速率檢測
Seekur系統(tǒng)使用的MEMS陀螺儀可直接測量Seekur關(guān)于偏航(垂直)軸的旋轉(zhuǎn)速率,該軸在Seekur導(dǎo)航參考坐標(biāo)系內(nèi)與地球表面垂直。用于計(jì)算相對駛向的數(shù)學(xué)關(guān)系式是固定時(shí)間內(nèi)(t1 至t2)角速率測量結(jié)果的簡單積分。

該方法的主要優(yōu)勢之一是連接至機(jī)器人機(jī)架的陀螺儀可測量車輛的實(shí)際運(yùn)動(dòng),而無需依靠齒輪比、齒輪隙、輪胎幾何形狀或表面接觸完整性。不過,駛向估算需要依靠傳感器精度,而該精度取決于偏置誤差、噪聲、穩(wěn)定性和靈敏度等關(guān)鍵參數(shù)。固定偏置誤差轉(zhuǎn)換為駛向漂移速率,如包含偏置誤差ωBE的下列關(guān)系式所示:

偏置誤差可分為兩種:當(dāng)前誤差和條件相關(guān)誤差。Seekur系統(tǒng)估算的是未運(yùn)動(dòng)時(shí)的當(dāng)前偏置誤差。這要求導(dǎo)航電腦能夠識別未執(zhí)行位置變化命令的狀態(tài),同時(shí)還要方便進(jìn)行數(shù)據(jù)收集偏置估算和校正系數(shù)更新。該過程的精度取決于傳感器噪聲以及可用于收集數(shù)據(jù)并構(gòu)建誤差估算的時(shí)間。如圖7所示,Allan方差曲線提供了偏置精度與求均值時(shí)間之間的簡便關(guān)系式,進(jìn)而確定了ADIS16265的關(guān)系式。ADIS16265是一款與Seekur系統(tǒng)目前所用的陀螺儀類似的iSensor® MEMS器件。本例中,Seekur可將20秒內(nèi)的平均偏置誤差減小至0.01°/秒以下,并可通過在約100秒的周期內(nèi)求均值來優(yōu)化估算結(jié)果。
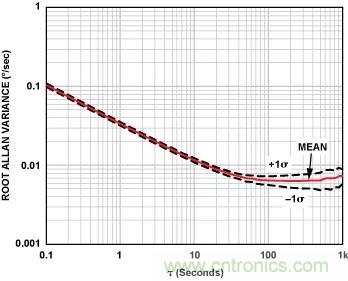
圖7. ADIS16265 Allan方差曲線。
Allan 方差4 關(guān)系式還有助于深入了解最佳積分時(shí)間(τ = t2 – t1). 該曲線上的最低點(diǎn)通常被確定為運(yùn)行中偏置穩(wěn)定度。通過設(shè)置積分時(shí)間τ,使其等于與所用陀螺儀的Allan方差曲線上最低點(diǎn)相關(guān)的積分時(shí)間,可優(yōu)化駛向估算結(jié)果。
包括偏置溫度系數(shù)在內(nèi)的條件相關(guān)誤差會(huì)影響性能,因此它們可決定需要每隔多久停止一次機(jī)器人的運(yùn)行,以更新其偏置校正。使用預(yù)校準(zhǔn)的傳感器有助于解決最常見的誤差源,例如溫度和電源變化。例如,將ADIS16060 改為預(yù)校準(zhǔn)的ADIS16265可能會(huì)增加尺寸、價(jià)格和功率,但可以將相對于溫度的穩(wěn)定性提高18倍。對于2°C溫度變化,ADIS16060的最大偏置為0.22°/秒,而ADIS16265只有0.012°秒。
如以下關(guān)系式所示靈敏度 誤差源與實(shí)際駛向變化成正比:

商用MEMS傳感器的額定靈敏度誤差通常在±5%至±20%以上,因此需要進(jìn)行校準(zhǔn)以減小這些誤差。例如ADIS16265和ADIS16135等預(yù)校準(zhǔn)MEMS5 陀螺儀的額定誤差小于±1%,在受控環(huán)境中甚至可以達(dá)到更高性能。
# 應(yīng)用范例:
倉庫庫存交貨
倉庫自動(dòng)化系統(tǒng)目前使用叉車和傳送帶系統(tǒng)移動(dòng)材料,以管理庫存并滿足需求。叉車需要直接人為控制,而傳送帶系統(tǒng)則需要定期維護(hù)。為了最大化倉庫價(jià)值,許多倉庫正在進(jìn)行重新配置,從而為自主機(jī)器人平臺的應(yīng)用敞開了大門。一組機(jī)器人僅需要更改軟件、對機(jī)器人導(dǎo)航系統(tǒng)進(jìn)行再培訓(xùn)就能適應(yīng)新任務(wù),完全不需要實(shí)施大量工程作業(yè)來改造叉車和傳送帶系統(tǒng)。倉庫交貨系統(tǒng)中的關(guān)鍵性能要求是機(jī)器人必須能夠保持行程模式的一致性,可在有障礙物移動(dòng)的動(dòng)態(tài)環(huán)境下安全執(zhí)行機(jī)動(dòng)動(dòng)作,并且保證人員安全。為了說明在此類應(yīng)用中MEMS陀螺儀反饋對Seekur的價(jià)值,Adept MobileRobots用實(shí)驗(yàn)方式分別展示了在不使用(圖8)和使用(圖9)MEMS陀螺儀反饋的情況下,Seekur保持重復(fù)路徑的能力。應(yīng)注意,為了研究MEMS陀螺儀反饋的影響,該實(shí)驗(yàn)未采用GPS或激光掃描校正。
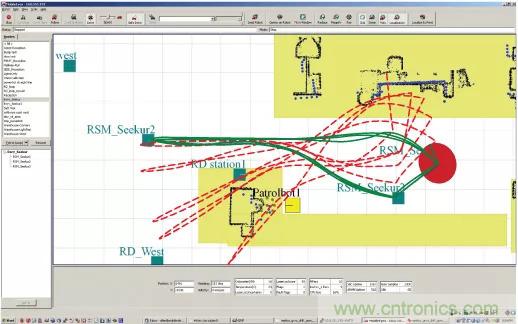
圖8. 未使用MEMS陀螺儀反饋時(shí)的Seekur路徑精度。
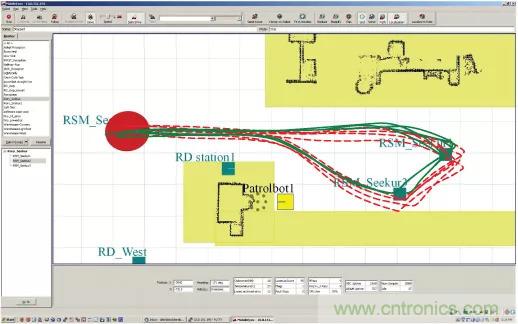
圖9. 使用MEMS陀螺儀反饋時(shí)的Seekur路徑精度。
比較圖8和圖9中的路徑軌跡,很容易看出兩者在保持路徑精度上的差異。應(yīng)注意,這些實(shí)驗(yàn)中采用的是早期MEMS技術(shù),支持~0.02°/秒的穩(wěn)定度。目前的陀螺儀在相同成本、尺寸和功率水平下性能可提高2到4倍。隨著這一趨勢的延續(xù),在重復(fù)路徑上維持精確導(dǎo)航的能力將繼續(xù)改善,這將為開發(fā)更多市場和應(yīng)用(例如醫(yī)院標(biāo)本/補(bǔ)給品遞送)帶來機(jī)遇。
補(bǔ)給品護(hù)送
目前美國國防高級研究計(jì)劃局(DARPA)在提案中仍強(qiáng)調(diào)更多地利用機(jī)器人技術(shù)來提升軍力。補(bǔ)給品護(hù)送便是這類應(yīng)用的一個(gè)范例,此時(shí)軍事護(hù)送隊(duì)伍暴露于敵方威脅之下,同時(shí)不得不按可預(yù)測的模式緩慢移動(dòng)。精確導(dǎo)航讓機(jī)器人(如Seekur)可在補(bǔ)給品護(hù)送方面承擔(dān)更多責(zé)任,減少途中人員的安全威脅。一個(gè)關(guān)鍵性能指標(biāo)是對GPS中斷情況的管理能力,此時(shí)MEMS陀螺儀駛向反饋特別有用。最新Seekur導(dǎo)航技術(shù)正是針對這一環(huán)境而開發(fā)的,它使用MEMS慣性測量單元(IMUs)6提高了精度,并且能在未來不斷采納地形管理和其他功能領(lǐng)域的新技術(shù)成果。
為了測試該系統(tǒng)在使用和不使用IMU時(shí)的定位性能,對室外路徑誤差進(jìn)行了記錄和分析。圖10比較了僅使用測程法時(shí)相對于真實(shí)路徑(源自GPS)的誤差與在卡爾曼濾波器內(nèi)結(jié)合使用測程法與IMU時(shí)的誤差。后者的位置精度是前者的近15倍。
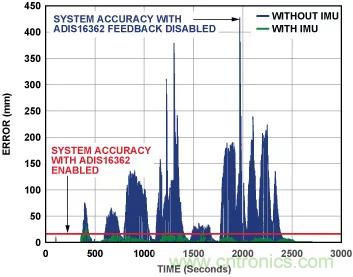
圖10. 使用測程法/IMU(綠色)與僅使用測程法(藍(lán)色)的Seekur位置誤差。
# 結(jié)論
機(jī)器人平臺開發(fā)人員發(fā)現(xiàn),MEMS陀螺儀技術(shù)為改善導(dǎo)航系統(tǒng)方向估算和總體精度提供了經(jīng)濟(jì)高效的方法。預(yù)校準(zhǔn)的系統(tǒng)就緒型器件使得簡單的功能集成得以實(shí)現(xiàn),有利于開發(fā)工作順利起步,并讓工程師可集中精力開展系統(tǒng)優(yōu)化。隨著MEMS技術(shù)持續(xù)改善陀螺儀噪聲、穩(wěn)定性和精度指標(biāo),精度和控制水平將不斷提高,從而可為自主機(jī)器人平臺繼續(xù)拓展新的市場。諸如Seekur等系統(tǒng)的下一代開發(fā)工作可從陀螺儀過渡到完全集成的MEMS IMU/6自由度(6DoF)傳感器。雖然面向偏航的方法很有用,但世界畢竟不是平面的;目前及未來的許多其他應(yīng)用均可利用MEMS IMU進(jìn)行地形管理和進(jìn)一步的精度改進(jìn),并通過三個(gè)陀螺儀實(shí)現(xiàn)完全對準(zhǔn)反饋和校正。
推薦閱讀:



