
【導讀】隨著自動駕駛的火熱,激光雷達受到前所未有的追捧,因為其具有高精度、大信息量、不受可見光干擾的優(yōu)勢。但我們可以注意到,目前主流的自動駕駛方案并未完全拋棄毫米波雷達,這又是什么原因呢?
一、引子
首先要明確,這里要講的雷達是發(fā)射電磁波的正經雷達,而不是發(fā)射機械波的倒車雷達。
二戰(zhàn)軍迷和歷史研究者大概對雷達技術的淵源了如指掌:第一臺實用雷達就是用于探測試圖半夜從空中越過英吉利海峽的德農——坐著飄在天上的金屬殼的德農。之后雷達既在太平洋夜戰(zhàn)中碾壓過島國訓練有素的戰(zhàn)列艦觀察兵的光榮時刻,也有過在貝卡谷地被猶太人的反輻射導彈炸成渣渣的慘痛歷史。
雷達從戰(zhàn)爭機器轉職交通行業(yè)的初期伴隨著無數(shù)車主的血淚——雷達測速。而現(xiàn)在雷達成為了車主擺脫油門的助手——自適應巡航的主傳感器,以及并線的保護神——盲點監(jiān)測和并線輔助用傳感器,還偶爾扮演避免追尾事故的最后一道防線——自動緊急制動用傳感器。
二、構造和原理
目前車載雷達的頻率主要分為24GHz頻段和77GHz頻段,其中77GHz頻段代表著未來的趨勢:這是國際電信聯(lián)盟專門劃分給車用雷達的頻段。嚴格來說77GHz的雷達才屬于毫米波雷達,但是實際上24GHz的雷達也被稱為毫米波雷達。
在工程實踐中,雷達天線具體實現(xiàn)的方法有很多種。目前車載雷達中比較常見的是平面天線陣列雷達,因為相比其他實現(xiàn)方式,平面雷達沒有旋轉機械部件,從而能保證更小的體積和更低的成本。下面以目前常見的平板天線雷達為例,介紹車載雷達的構造和原理。
先對車載雷達有個直觀地認識:

炸開看看:

其中這一片就是天線陣列,如下圖所示:
其中從上至下分別是10條發(fā)射天線TX1,然后是2條發(fā)射天線TX2,最后是4條接收天線RX1至RX4。
兩組發(fā)射天線分別負責探測近處和遠處的目標,其覆蓋范圍如下圖所示:
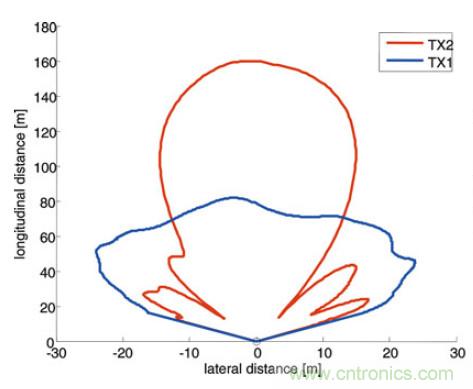
這里因為近處的視角(FOV)比較大,大概有90度,所以需要更多天線,而遠處的視角小,大概只有20度,所以兩根天線就夠了。
雷達裝在車上的樣子如下圖所示:

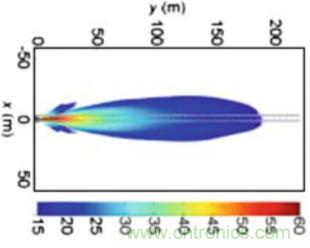
雷達通過天線發(fā)射和接收電磁波,所發(fā)射的電磁波并非各向均勻的球面波,而是以具有指向性的波束的形式發(fā)出,且在各個方向上具有不同的強度,如下圖所示:
雷達主要測量目標的三個參數(shù):位置、速度和方位角。下面簡單說說這三個參數(shù)的測量原理。
位置和速度
這兩個參數(shù)的測量原理在小學科普課本里就講了:雷達波由發(fā)射天線發(fā)出、被目標反射后,由接收天線接收雷達回波。通過計算雷達波的飛行時間,乘以光速再除以2就可以得到雷達和目標之間的距離。
而根據(jù)多普勒效應,通過計算返回接收天線的雷達波的頻率變化就可以得到目標相對于雷達的運動速度,簡單地說就是相對速度正比于頻率變化量。當目標和自車接近時,回波的頻率相比發(fā)射頻率有所升高,反之則頻率降低。
實現(xiàn)位置和速度的測量的具體方法根據(jù)雷達采用的調制方式的不同而有所不同。雷達的調制簡單來說就是為了實現(xiàn)雷達回波的識別和飛行時間的測量,需要在雷達發(fā)射的電磁波上加入標記和時間參考。在車載雷達中主要使用幅值調制和頻率調制兩種方式。
方位角
通過并列的接收天線收到同一目標反射的雷達波的相位差計算得到目標的方位角。原理如下圖所示:
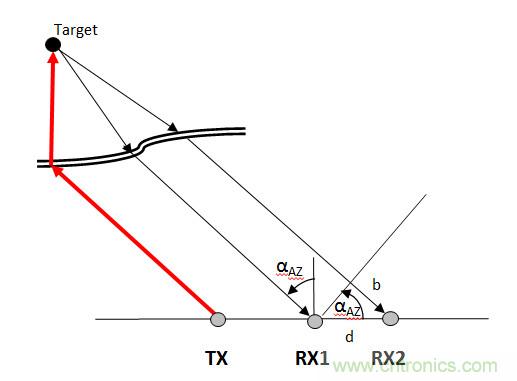
其中方位角αAZ可以通過兩個接收天線RX1和RX2之間的幾何距離d以及兩天線收到雷達回波的相位差b通過簡單的三角函數(shù)計算得到。
三、應用實例
毫米波雷達最常見的三種用途是:
ACC(自適應巡航)
BSD&LCA(盲點監(jiān)測和變道輔助)
AEB(自動緊急制動,通常配合攝像頭進行數(shù)據(jù)融合)
作為已經量產多年的技術,我想就不用再介紹以上功能的具體內容了。讓我們來說點更有趣的事:
a) 雷達的數(shù)據(jù)處理流程
實現(xiàn)ACC等功能的核心技術是目標識別與跟蹤。在接收天線收到雷達回波并解調后,控制器對模擬信號進行數(shù)字采樣并做相應的濾波。接下來用FFT手段將信號變換至頻域。接下來尋找信號中特定的特征,例如頻域的能量峰值。在這一步還不能得到我們需要的目標,獲取的僅僅是雷達波的反射點的信息。
并且,對于很多高性能雷達來說,此時獲得的多個反射點可能來自一個物體,例如一輛貨車可能形成5-10個反射點。所以首先還要將很可能屬于同一物體的反射點匹配到同一個反射點集群中。接下來通過跟蹤各個反射點集群,形成對物體的分布的猜測。
在下一個測量循環(huán)中,例如通過卡曼濾波,基于上一次的物體分布,預測本測量循環(huán)中可能的物體分布,然后嘗試將當前得到的反射點集群與預測結果進行匹配,例如通過比較物體的位置和速度等參數(shù)。當反射點集群與上一測量循環(huán)得到的物體信息匹配成功時,就得到了該物體的“軌跡”,同時該物體的可信度增加,反之則可信度下降。只有當一個物體的可信度超過一定門限時,該物體才會成為我們關心的目標而進入所謂的目標列表。
b) 關于雷達的兩個小問題
雷達到底能不能探測到靜止目標?
很多早期的ACC系統(tǒng)不會對靜止物體作出反應,也就是說,如果前方有靜止物體,例如在進入探測范圍之前就停在前方的車輛,ACC并不會將該車作為目標,不會發(fā)出減速請求。所以有人以為雷達無法探測靜止物體,這其實是一個誤解。
通過之前的敘述,我們可以看到,雷達探測能力只和物體的雷達波反射特性有關,不涉及其任何運動特性,所以只要物體的雷達反射截面足夠大,該物體不存在無法探測的問題。早期ACC不對靜止物體作出反應主要是由于目標分類的緣故。由于早期的雷達的角分辨率較低,導致高度方向和橫向的分辨率較低,無法很好的區(qū)分可以越過的物體,例如井蓋,或者可以從下方穿過的物體,例如路牌。
所以為了避免ACC誤動作,比如在高速公路上由于路牌而制動,設計成不對從探測到開始就保持的靜止物體進行反應,因為無法判斷該物體是基礎設施還是交通參與者。另一方面,即使是早期的ACC系統(tǒng),由于雷達保存了該目標的歷史信息,如果已經探測到的車輛從行駛中制動到停止,系統(tǒng)仍然能夠將該物體劃分為交通參與者,從而進行制動。
相比激光雷達的優(yōu)勢?
隨著自動駕駛的火熱,激光雷達受到前所未有的追捧,因為其具有高精度、大信息量、不受可見光干擾的優(yōu)勢。但我們可以注意到,目前主流的自動駕駛方案并未完全拋棄毫米波雷達,這又是什么原因呢?
首先就是大家都知道的天氣原因。激光的波長遠小于毫米波雷達(nm vs mm),所以霧霾導致激光雷達失效并不是段子。同樣的原因,毫米波雷達的探測距離可以輕松超過200米,而激光雷達目前的性能一般不超過150米,所以對于高速公路跟車這樣的情景,毫米波雷達能夠做的更好。
其次,毫米波雷達便宜啊,作為成熟產品,毫米波雷達目前的價格大概在1.5千左右,而激光雷達的價格目前仍然是以萬作為單位計算的。并且由于激光雷達獲取的數(shù)據(jù)量遠超毫米波雷達,所以需要更高性能的處理器處理數(shù)據(jù),更高性能的處理器同時也意味著更高的價格。所以對于工程師而言,在簡單場景中,毫米波雷達仍然是最優(yōu)選擇。
(來源:雷鋒網)
推薦閱讀:

