
【導(dǎo)讀】雖然數(shù)字相控陣在商業(yè)以及航空航天和防務(wù)應(yīng)用中不斷增長(zhǎng),但許多設(shè)計(jì)工程師對(duì)相控陣天線并不算了解。相控陣天線設(shè)計(jì)并非新生事物,經(jīng)過(guò)數(shù)十年的發(fā)展,這一理論已經(jīng)相當(dāng)成熟,但是,大多數(shù)文獻(xiàn)僅適合精通電磁數(shù)學(xué)的天線工程師。隨著相控陣開始包含更多混合信號(hào)和數(shù)字內(nèi)容,許多工程師可以從更直觀的相控陣天線方向圖說(shuō)明中獲益。事實(shí)證明,相控陣天線行為與混合信號(hào)和數(shù)字工程師每天處理的離散時(shí)間采樣系統(tǒng)之間有許多相似之處。
本系列文章的目的并非培養(yǎng)天線設(shè)計(jì)工程師,而是向使用相控陣子系統(tǒng)或器件的工程師展現(xiàn)他們的工作對(duì)相控陣天線方向圖的影響。
波束方向
首先,讓我們來(lái)看看一個(gè)直觀的相控陣波束轉(zhuǎn)向示例。圖1是一個(gè)簡(jiǎn)單的圖示,描繪了波前從兩個(gè)不同方向射向四個(gè)天線元件。在接收路徑上的每個(gè)天線元件后面都會(huì)產(chǎn)生延時(shí),之后所有四個(gè)信號(hào)再匯總到一起。在圖1a中,該延時(shí)與波前到達(dá)每個(gè)元件的時(shí)間差一致。在本例中,產(chǎn)生的延時(shí)會(huì)導(dǎo)致四個(gè)信號(hào)同相到達(dá)合并點(diǎn)。這種一致的合并會(huì)增強(qiáng)組合器輸出的信號(hào)。在圖1b中,產(chǎn)生的延時(shí)相同,但在本例中,波前與天線元件垂直?,F(xiàn)在產(chǎn)生的延時(shí)與四個(gè)信號(hào)的相位不一致,因此組合器輸出會(huì)被大幅削弱。
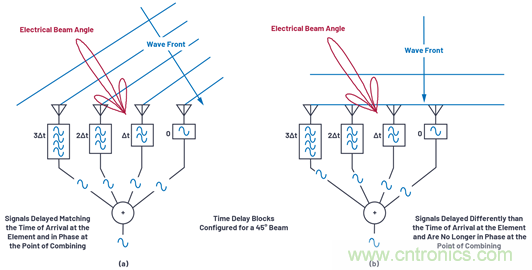
圖1.理解轉(zhuǎn)向角度。
在相控陣中,延時(shí)是波束轉(zhuǎn)向所需的可量化變量。但也可以通過(guò)相移來(lái)仿真延時(shí),這在許多實(shí)現(xiàn)中是十分常見且實(shí)用的做法。我們將在介紹波束斜視的部分討論延時(shí)與相移的影響,但目前我們先來(lái)了解相移實(shí)現(xiàn),然后推導(dǎo)相應(yīng)相移的波束轉(zhuǎn)向計(jì)算。
圖2所示為使用移相器而非延時(shí)的相控陣排列。請(qǐng)注意,我們將瞄準(zhǔn)線方向(θ = 0°)定義為垂直于天線正面。瞄準(zhǔn)線右側(cè)定義為正角θ,瞄準(zhǔn)線左側(cè)定義為負(fù)角。
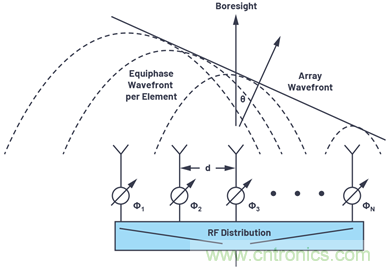
圖2.使用RF移相器的相控陣概念。
要顯示波束轉(zhuǎn)向所需的相移,可以在相鄰元件之間繪制一組直角三角形,如圖3所示。其中,ΔΦ表示這些相鄰元件之間的相移。

圖3.相移ΔΦ與波束轉(zhuǎn)向角度的推導(dǎo)。
圖3a定義了這些元件之間的三角恒等式,各元件之間相隔距離用(d)表示。波束指向與瞄準(zhǔn)線相距θ的方向,波束距離視平線的角度為φ。在圖3b中,我們看到θ與φ的和為90°。這樣我們就可以計(jì)算L,因?yàn)長(zhǎng) = dsin(θ),L表示波傳播的變量距離。波束轉(zhuǎn)向所需的延時(shí)等于波前遍歷該距離L所用的時(shí)間。如果將L視作波長(zhǎng)的分?jǐn)?shù),則相位延遲可以用該延時(shí)替代。ΔΦ等式可以定義為相對(duì)于θ,如圖3c所示以及等式1中的重復(fù)計(jì)算。
如果元件間隔正好等于信號(hào)波長(zhǎng)的一半,則可以進(jìn)一步簡(jiǎn)化為:
我們以具體示例來(lái)計(jì)算這些等式。假設(shè)兩個(gè)天線元件間隔15 mm。如果一個(gè)10.6 GHz的波前以距離機(jī)械瞄準(zhǔn)線30°的角度到達(dá),那么這兩個(gè)元件之間的最佳相移是多少?

所以,如果波前以θ = 30°到達(dá),并將相鄰元件的相位移動(dòng)95°,則可以使兩個(gè)元件各自的信號(hào)實(shí)現(xiàn)一致疊加。這樣就可以使該方向的天線增益達(dá)到最大值。
為深入理解相移如何隨著波束方向(θ)而變,圖4以圖形方式繪制了不同條件下的這些等式圖解。從這些圖形中可以觀察到一些有趣的現(xiàn)象。比如,d = λ/2時(shí),瞄準(zhǔn)線附近的斜率約為3:1,即等式2中的乘數(shù)π。這種情況還展示出,元件之間達(dá)到180°完整相移會(huì)使波束方向達(dá)到理論相移90°。實(shí)際上,在真實(shí)的元件方向圖中,這是不可能實(shí)現(xiàn)的,但等式的確顯示出理論上的理想值。需要注意的是,d > λ/2時(shí),不存在能夠提供完整波束位移的相移。在后面的文章中,我們將會(huì)介紹該情況會(huì)導(dǎo)致天線方向圖中的柵瓣,該圖形是第一次表明,d > λ/2情況下的行為有所不同。
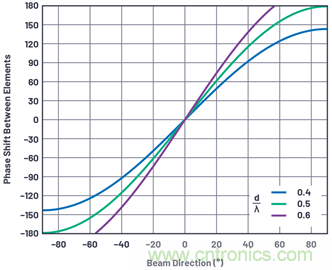
圖4.三種d/λ情況下,元件之間的相移ΔΦ與波束方向(θ)之間的關(guān)系。
等間隔線性陣列
上文推導(dǎo)的等式僅適用于兩個(gè)元件。但實(shí)際的相控陣可能在兩個(gè)維度上包含數(shù)千個(gè)間隔開的元件。但出于本文用途,我們僅考慮一個(gè)維度:線性陣列。
線性陣列為單元件寬度,其中包含N個(gè)元件。不同線性陣列,間隔可能各有不同,但同一線性陣列通常是等間隔。因此,在本文中,我們將各個(gè)元件之間的間隔設(shè)為統(tǒng)一距離d(圖5)。該等間隔線性陣列模型雖然是簡(jiǎn)化版,但基本介紹了天線方向圖如何形成以及各種不同的條件。我們可以進(jìn)一步運(yùn)用線性陣列原理來(lái)理解二維陣列。

圖5.等間隔線性陣列(N = 4)。
近場(chǎng)與遠(yuǎn)場(chǎng)
如何將上文針對(duì)N = 2的線性陣列推導(dǎo)的公式運(yùn)用到N = 10,000的線性陣列呢?現(xiàn)在,似乎每個(gè)天線元件都以稍微不同的角度指向球形波前,如圖6所示。
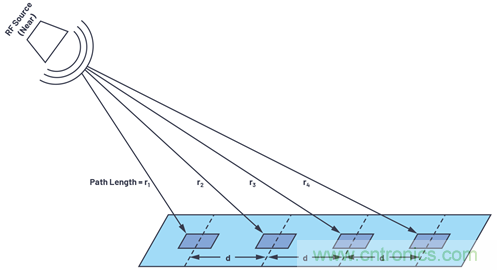
圖6.RF信號(hào)源與線性陣列較近。
如果RF源較近,則每個(gè)元件的入射角不同。這種情況稱為近場(chǎng)。我們可以算出所有這些角度,有時(shí)需要這么做是為了進(jìn)行天線測(cè)試和校準(zhǔn),因?yàn)槲覀兊臏y(cè)試裝置只能這么大。但如果RF源較遠(yuǎn),則就是圖7所示的情況。
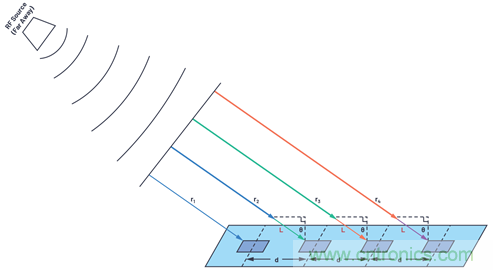
圖7.RF信號(hào)源與線性陣列相隔較遠(yuǎn)。
如果RF源較遠(yuǎn),則球形波前的大半徑會(huì)導(dǎo)致大致平行的波傳播路徑。因此,所有波束角均相等,每個(gè)相鄰元件的路徑長(zhǎng)度(L = d × sinθ)均超過(guò)隔壁元件。這樣簡(jiǎn)化了數(shù)學(xué)計(jì)算,意味著我們推導(dǎo)出來(lái)的雙元件等式可以應(yīng)用到數(shù)千個(gè)元件,但前提是這些元件間隔相同。
但在什么情況下可以做出遠(yuǎn)場(chǎng)假設(shè)?遠(yuǎn)場(chǎng)有多遠(yuǎn)?雖然稍顯主觀,但通常而言,遠(yuǎn)場(chǎng)定義是超過(guò):
其中,D表示天線直徑(對(duì)于等間隔線性陣列為(N-1) × d)
對(duì)于小型陣列(D值?。┗虻皖l(λ值大),遠(yuǎn)場(chǎng)距離較小。但對(duì)于大型陣列(或高頻),遠(yuǎn)場(chǎng)距離可能長(zhǎng)達(dá)數(shù)千米!這樣測(cè)試和校準(zhǔn)陣列就十分困難。對(duì)于這類情況,可以使用更為詳細(xì)的近場(chǎng)模型,然后再按比例擴(kuò)展到真實(shí)世界使用的遠(yuǎn)場(chǎng)陣列。
天線增益、方向性和孔徑
在繼續(xù)深入之前,先了解天線增益、方向性和孔徑的定義十分有用。首先介紹增益與方向性,因?yàn)檫@兩個(gè)概念經(jīng)常互換使用。天線增益和方向性是相較于各向同性天線而言,各向同性天線是所有方向均勻輻射的理想天線。方向性是指在特定方向上測(cè)得的最大功率Pmax與所有方向輻射的平均功率Pav的比值。如果沒(méi)有定義方向,則方向性通過(guò)等式4確定。/p>
在比較天線時(shí),方向性是一個(gè)有用指標(biāo),因?yàn)樗x了集中輻射能量的能力。增益與方向性的方向圖相同,但增益包含天線損耗。
Prad是總輻射功率, Pin是輸入到天線的功率,k表示天線輻射過(guò)程中的損耗。
接下來(lái),我們將天線方向圖視為三維方向的函數(shù),將方向性視為波束寬度的函數(shù)。
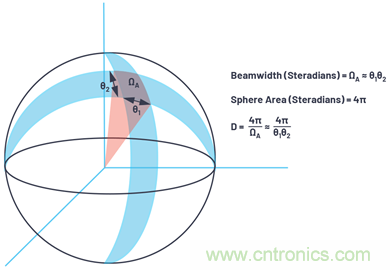
圖8.投射到球體的面積的三維視圖。
球體的總表面積是4π2,球體上的面積以球面度為單位定義,等于球體中的4π球面度。因此,來(lái)自各向同性輻射體的功率密度為
采用的單位為(W/m2).
球體上的一塊面積有兩個(gè)角方向。在雷達(dá)系統(tǒng)中,這兩個(gè)角方向通常稱作方位角和俯仰角。波束寬度可以描述為每個(gè)角方向的函數(shù)(θ1和θ2):該組合會(huì)在球體上形成一塊面積ΩA.
ΩA是以球面度為單位表示的波束寬度,可以近似為ΩA ≈ θ1 × θ2.
確認(rèn)ΩA為球體上的面積后,方向性可以表示為
我們將要考慮的第三個(gè)天線術(shù)語(yǔ)是孔徑。天線孔徑表示用于接收電磁波的有效面積,包含相對(duì)于波長(zhǎng)的函數(shù)。各向同性天線的孔徑為
增益是相對(duì)于各向同性天線而言,產(chǎn)生的有效天線孔徑為
綜合三個(gè)術(shù)語(yǔ)來(lái)看,可以將增益視作用于定義輻射方向圖的角的函數(shù),表示天線中的效率(或損耗)。
線性陣列的陣列因子
目前,我們能夠預(yù)測(cè)元件之間的最佳時(shí)間(或相位)變量來(lái)實(shí)現(xiàn)最大天線方向性。但我們非常需要了解和操作完整的天線增益方向圖。這分為兩個(gè)主要方面。首先,陣列的每個(gè)獨(dú)立元件(或許是貼片)都存在增益,稱為元件因子(GE)。其次,通過(guò)陣列波束成型會(huì)產(chǎn)生增益影響,稱為陣列因子 (GA)。全陣列天線增益方向圖是這兩個(gè)因子的組合,如等式10所示。
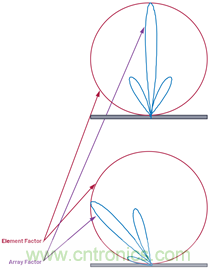
圖9.元件因子和陣列因子。
圖9.元件因子和陣列因子。GE表示陣列中單個(gè)元件的輻射方向圖。其定義取決于天線的幾何形狀和構(gòu)造,而不是在運(yùn)行中會(huì)發(fā)生變化的因素。知道這一點(diǎn)很重要,因?yàn)檫@會(huì)限制總陣列的增益——尤其是靠近視平線時(shí)。但由于我們不采用電子控制,因此可以將它保持固定不變,作為總相控陣增益等式的影響因子。在本文中,我們假設(shè)所有獨(dú)立元件都有相同的元件因子。
接下來(lái)重點(diǎn)介紹陣列因子GA。陣列因子的計(jì)算基于陣列幾何結(jié)構(gòu)(d表示等間隔線性陣列)和波束權(quán)重(幅度和相位)。推導(dǎo)等間隔線性陣列的陣列因子十分簡(jiǎn)單,但本文末尾引用的參考文獻(xiàn)中詳細(xì)介紹了相關(guān)內(nèi)容。
文獻(xiàn)中使用的等式各有不同,具體取決于線性陣列參數(shù)的定義方式。我們使用本文中的等式,以便與圖2和圖3中的定義保持一致。由于主要問(wèn)題在于增益如何變化,因此繪制相對(duì)于單位增益的標(biāo)準(zhǔn)化陣列因子通常更具指導(dǎo)意義。標(biāo)準(zhǔn)化陣列因子可以寫為等式11。

我們已將波束角度θ0定義為元件之間的相移的函數(shù)θ0;因此,我們也可以將標(biāo)準(zhǔn)化天線因子寫為等式12

陣列因子等式中假設(shè)的條件包括:
● 元件間距相等。
● 元件之間的相移相同。
● 所有元件的幅度相同。
接下來(lái),我們利用這些等式繪制多種陣列尺寸的陣列因子。
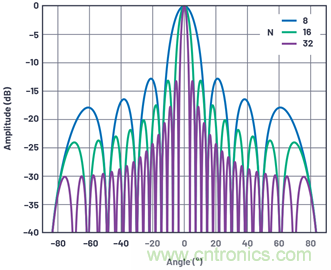
圖10.位于線性陣列瞄準(zhǔn)線的標(biāo)準(zhǔn)化陣列因子,其中元件間隔為d = λ/2,元件數(shù)量分別為8、16和32。
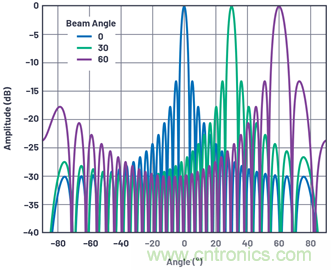
圖11.處于多種波束角度的32元件線性陣列的標(biāo)準(zhǔn)化陣列因子,其中元件間隔為d = λ/2。
從這些數(shù)據(jù)中可以觀察到以下幾點(diǎn):
● 第一個(gè)旁瓣位于–13 dBc,與元件數(shù)量無(wú)關(guān)。這是由陣列因子等式中的sinc函數(shù)決定的。旁瓣可以通過(guò)逐漸減少元件中的增益來(lái)改善,這一主題將在本系列后續(xù)內(nèi)容中探討。
● 波束寬度隨著元件數(shù)量而減小。
● 掃描的波束離瞄準(zhǔn)線越遠(yuǎn),波束寬度會(huì)隨之變寬。
● 零點(diǎn)的數(shù)量隨著元件數(shù)量的增加而增多。
波束寬度
波束寬度是天線角度分辨率的一個(gè)指標(biāo)。最常見的是通過(guò)半功率波束寬度(HPBW)或主瓣的零點(diǎn)到零點(diǎn)的間隔(FNBW)定義波束寬度。要找到HPBW,從峰值向下移動(dòng)3 dB,并測(cè)量角距,如圖12所示。
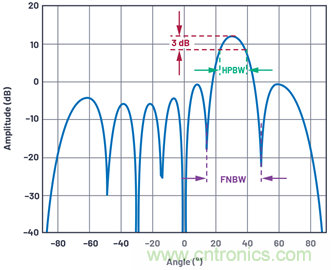
圖12.天線波束寬度的定義(所示線性陣列為N = 8,d = λ/2,θ = 30°)。
利用我們的標(biāo)準(zhǔn)化陣列因子等式,可以通過(guò)將等式3設(shè)為等于半功率級(jí)別(3 dB或1/√2)來(lái)解算該HPBW。我們假設(shè)機(jī)械瞄準(zhǔn)線(θ = 0°)、N = 8且d = λ/2。

然后解算?Φ得出0.35 rad。利用等式1并解算θ:
該θ是到達(dá)3 dB點(diǎn)(即HPBW的一半)的峰值。因此,我們只需要將它乘以2即可獲得3 dB點(diǎn)之間的角距。這會(huì)得出12.8°的HPBW。
我們可以對(duì)等于0的陣列因子重復(fù)這個(gè)計(jì)算,并獲得在前文所述條件下的第一個(gè)零點(diǎn)到零點(diǎn)的間隔角度FNBW 28.5°。
對(duì)于等間隔線性陣列,等式15可計(jì)算出HPBW [1,2]的近似值。
圖13繪制了在λ/2元件間隔條件下多種元件數(shù)量的波束寬度與波束角。
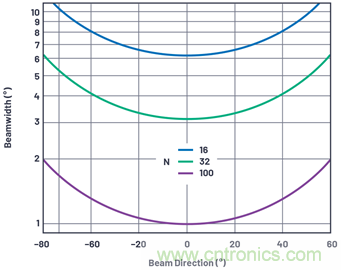
圖13.元件數(shù)量為16、32和100時(shí),元件間隔為λ/2的波束寬度與波束角。
在此圖中,值得注意的是與業(yè)界正在開發(fā)的陣列尺寸相關(guān)的一些觀察結(jié)果。
● 1°波束精度要求存在100個(gè)元件。如果方位角和俯仰角都有此要求,則會(huì)產(chǎn)生包含10,000個(gè)元件的陣列。1°精度只會(huì)出現(xiàn)在近乎理想條件下的瞄準(zhǔn)線處。在現(xiàn)場(chǎng)陣列中,若要在多種掃描角中保持1°精度,將會(huì)進(jìn)一步增加元件數(shù)量。這一觀察結(jié)果會(huì)為超大陣列設(shè)定波束寬度的實(shí)際限制。
● 1000個(gè)元件的陣列是業(yè)界常見陣列。如果每個(gè)方向32個(gè)元件,則總共擁有1024個(gè)元件,靠近瞄準(zhǔn)線處會(huì)產(chǎn)生小于4°的波束精度。
● 256個(gè)元件的陣列可以低成本量產(chǎn),并且仍具有小于10°的波束指向精度。這或許是許多應(yīng)用能夠接受的理想選擇。
● 另外還需注意的是,對(duì)于上述任何情況,波束寬度在60°偏移處將會(huì)翻倍。這是因?yàn)榉帜钢杏衏osθ,受陣列投影縮減的影響;即,從某個(gè)角度觀察時(shí),陣列看起來(lái)像是縮小的交叉部分。
組合元件因子和陣列因子
上一節(jié)僅考慮了陣列因子。但為了找出總天線增益,還需要元件因子。圖14描述了一個(gè)示例。在該示例中,我們使用一個(gè)簡(jiǎn)單的余弦形狀作為元件因子,或標(biāo)準(zhǔn)化元件增益GE(θ)。余弦滾降在相控陣分析中十分常見,如果考慮的是平面,則可以將它顯示出來(lái)。在寬邊,有一個(gè)最大面積。隨著角度遠(yuǎn)離寬邊,可見面積會(huì)隨著余弦函數(shù)而減小。
在上文的λ/2間隔、均勻輻射方向圖、含16個(gè)元件的線性陣列中使用了陣列因子GA(θ)??偡较驁D是元件因子和陣列因子的線性乘積,因此采用dB刻度,可以將它們相加。
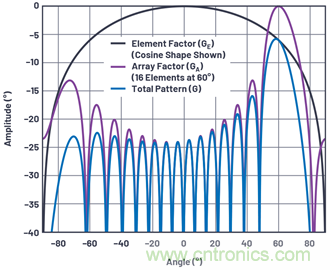
圖14.元件因子和陣列因子組合形成總天線方向圖。
隨著波束遠(yuǎn)離瞄準(zhǔn)線的一些觀察結(jié)果:
● 主波束的幅值按照元件因子的速率衰減。
● 瞄準(zhǔn)線上的旁瓣沒(méi)有幅度損失。
● 在原理瞄準(zhǔn)線時(shí)總體陣列的旁瓣性能下降。
天線繪圖:笛卡爾與極坐標(biāo)
目前使用的天線方向圖繪圖一直采用笛卡爾坐標(biāo)。但采用極坐標(biāo)繪制天線方向圖也很常見,因?yàn)樗鼈兏菀妆硎緩奶炀€向外部空間輻射的能量。圖15是圖12的重繪版本,但使用的是極坐標(biāo)。請(qǐng)注意,采用的數(shù)據(jù)完全相同,只是以極坐標(biāo)系統(tǒng)重新繪制。能夠以任一表示方法呈現(xiàn)天線方向圖是十分有意義的,因?yàn)檫@兩種系統(tǒng)在文獻(xiàn)中均會(huì)使用。在本系列的大部分內(nèi)容中,我們將使用笛卡爾坐標(biāo),因?yàn)樵摫硎痉椒ǜ菀妆容^波束寬度和旁瓣性能。
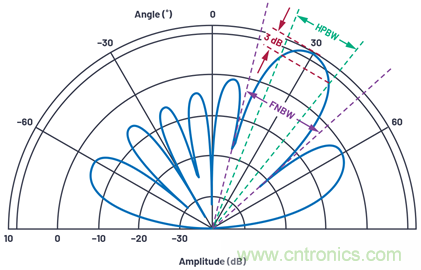
圖15.N = 8,d = λ/2,θ = 30°的極坐標(biāo)天線方向性繪圖。
陣列相互作用
截至目前,所有圖解和文字均描述的是陣列接收的信號(hào)。那么對(duì)于發(fā)射陣列會(huì)有何不同呢?幸運(yùn)的是,大多數(shù)天線性陣列存在相互作用關(guān)系。因此,接收天線的所有圖解、等式和術(shù)語(yǔ)與發(fā)射天線相同。有時(shí)將波束視為由陣列接收會(huì)更容易理解。而有時(shí),比如就柵瓣而言,或許將陣列視為發(fā)射波束更為直觀。在本文中,我們通常將陣列描述為接收信號(hào)。但如果對(duì)您而言難以想象,也可以從發(fā)射角度思考相同的概念。
小結(jié)
本系列第1部分至此結(jié)束。本文介紹了關(guān)于相控陣波束轉(zhuǎn)向的概念。推導(dǎo)并以圖形方式展示了用來(lái)計(jì)算波束轉(zhuǎn)向的陣列相移的等式。然后通過(guò)觀察元件數(shù)量、元件間隔和波束角對(duì)天線響應(yīng)的影響,定義了陣列因子和元件因子。最后,展示了以笛卡爾與極坐標(biāo)表示的天線方向圖對(duì)比。
在本系列后續(xù)文章中,將進(jìn)一步探討相控陣天線方向圖和減損。我們將研究天線變窄如何導(dǎo)致旁瓣縮小,柵瓣是如何形成的,以及在寬帶系統(tǒng)中相移與延時(shí)的影響。本系列最后將對(duì)延遲塊的有限分辨率進(jìn)行分析,介紹它如何形成量化旁瓣并降低波束分辨率。
參考電路
Balanis, Constantine A. 天線理論:分析與設(shè)計(jì)。第三版,Wiley,2005年。
Mailloux, Robert J. 相控陣天線手冊(cè)。第二版,Artech House,2005年。
O’Donnell, Robert M. “雷達(dá)系統(tǒng)工程:簡(jiǎn)介。”IEEE,2012年6月。
Skolnik, Merrill. 雷達(dá)手冊(cè)。第三版,McGraw-Hill,2008年。
推薦閱讀:


