
【導(dǎo)讀】本文中,我們將介紹先進(jìn)的掃描陣列雷達(dá),從經(jīng)驗(yàn)豐富的雷達(dá)信號處理專家的角度以及傳統(tǒng)的嵌入式系統(tǒng)設(shè)計(jì)人員的角度來研究其體系結(jié)構(gòu)。
主動電掃描陣列 (AESA) 雷達(dá)是當(dāng)今先進(jìn)武器系統(tǒng)的關(guān)鍵組成 , 特別是機(jī)載作戰(zhàn)系統(tǒng)。而其體系結(jié)構(gòu)的未來發(fā)展將超越最初的軍事應(yīng)用,延伸到地球物理測繪、汽車輔助駕駛、自動車輛、工業(yè)機(jī)器人和增強(qiáng)現(xiàn)實(shí)等領(lǐng)域:實(shí)際上, 這包括任何需要對大量的傳感器數(shù)據(jù)進(jìn)行調(diào)理,融合到模型中進(jìn)行判決的應(yīng)用。
隨著 AESA 體系結(jié)構(gòu)的擴(kuò)展 , 它們將突破雷達(dá)信號處理專業(yè)應(yīng)用 , 延伸到其他應(yīng)用中。在外部應(yīng)用中,這些設(shè)計(jì)會遇到典型的嵌入式設(shè)計(jì)流程:以 CPU 和軟件為中心的,基于 C 的以及與硬件無關(guān)的。本文中,我們將介紹先進(jìn)的掃描陣列雷達(dá),從經(jīng)驗(yàn)豐富的雷達(dá)信號處理專家的角度以及傳統(tǒng)的嵌入式系統(tǒng)設(shè)計(jì)人員的角度來研究其體系結(jié)構(gòu)。
典型系統(tǒng)的角色
掃描陣列和傳統(tǒng)移動盤式雷達(dá)的不同在于天線。掃描陣列并沒有采用熟悉的連續(xù)旋轉(zhuǎn)拋物線天線,而是在大部分系統(tǒng)中采用了平面靜止天線。陣列并不是有一個(gè)單元聚 焦在反射器上,而是有數(shù)百上千個(gè)單元,每個(gè)單元都有自己的收發(fā)器模塊。系統(tǒng)電子電路處理每一單元信號的振幅和相位 , 形成雷達(dá)波束和接收方向圖并聚焦 , 設(shè)置定義總天線方向圖的干涉方向圖。
這一方法避免了采用大量的移動部件,支持雷達(dá)實(shí)現(xiàn)傳統(tǒng)天線采用物理方法無法獲得的功能,例如,瞬 時(shí)改變波束方向,發(fā)送和接收同時(shí)有多個(gè)天線方向圖,或者把陣列分成多個(gè)天線陣,完成多項(xiàng)功能 —— 也就是,根據(jù)地形搜索目標(biāo),同時(shí)跟蹤目標(biāo)。這些方法只需要在發(fā)送器增加一些信號,在每一接收器將信號分開。重疊是一種很好的方法。
一個(gè)完整的系統(tǒng)從CPU簇傳輸?shù)教炀€,然后再返回 ( 圖 1 ) 。 一開始處理時(shí),軟件控制的波形發(fā)生器產(chǎn)生系統(tǒng)要發(fā)送的啁啾。取決于應(yīng)用,降噪、多普勒處理和隱身的需求會對信號有所損傷。
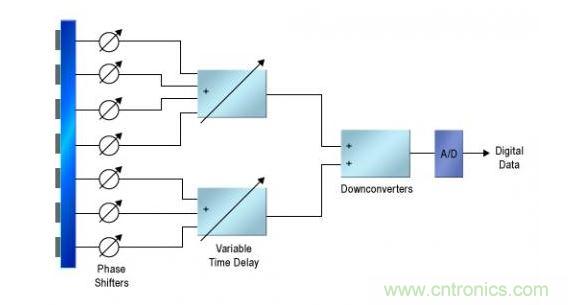
圖 1 .一個(gè)非常簡化的 AESA 系統(tǒng)結(jié)構(gòu)圖。
波形發(fā)生器將信號送到聚束網(wǎng)絡(luò)中。在這里,信號被連接至每一發(fā)送通道。在這一級,數(shù)字復(fù)用器在通道上應(yīng)用振幅權(quán)重來實(shí)現(xiàn)空間濾波,對波形整形。這一步也可以 稍后再做。在很多設(shè)計(jì)中,每一通道的信號現(xiàn)在會通過一個(gè)數(shù)模轉(zhuǎn)換器 (DAC) ,然后輸入到模擬 IF 和 RF 上變頻器中。 RF 上變頻后,信號到達(dá)獨(dú)立的發(fā)送器模塊,附加上相移或者時(shí)延,調(diào)整振幅 ( 如果在基帶沒有做 ) ,最終進(jìn)行濾波和放大。
一開始,接收到的信號實(shí)際上通過與反方向相同的通路,在后端要進(jìn)行更多的處理。在每一個(gè)天線單元,限幅器和帶通濾波器保護(hù)了低噪聲放大器。放大器驅(qū)動 RF 下變頻器,可以結(jié)合模擬放大和調(diào)相功能。信號從 IF 級傳輸?shù)交鶐В恳惶炀€單元的信號到達(dá)其模數(shù)轉(zhuǎn)換器 (ADC) 。然后,聚束模塊把天線信號重新組合成一路或者多路復(fù)數(shù)數(shù)據(jù)采樣流,每一數(shù)據(jù)流代表了來自某一接收波束的信號。這些信號流通過大占空比的數(shù)字信號處理 (DSP) 電路,進(jìn)一步調(diào)理數(shù)據(jù),進(jìn)行多普勒處理,嘗試從噪聲中提取出實(shí)際信號。
[page]
什么時(shí)候進(jìn)行數(shù)據(jù)轉(zhuǎn)換
在很多設(shè)計(jì)中,大部分信號處理工作是以模擬方式完成的。但是,隨著數(shù)字速度的提高,功耗和成本的降低,數(shù)據(jù)轉(zhuǎn)換器與天線靠的越來越近。 Altera 應(yīng)用專家 Colman Cheung 建議了一個(gè)理想的系統(tǒng),直接從 DAC 驅(qū)動天線單元。但是, 2013 年,這類設(shè)計(jì)在技術(shù)上還無法實(shí)現(xiàn),特別是, trans-GHz RF 。
目前可以把數(shù)據(jù)轉(zhuǎn)換器放在 IF 中,進(jìn)行 IF 頻率轉(zhuǎn)換,所有基帶處理工作都是數(shù)字化的 ( 圖 2 ) 。 可以在基帶聚束網(wǎng)絡(luò)中,以數(shù)字方式在天線單元之間產(chǎn)生干涉方向圖的時(shí)延,每一個(gè)天線單元并不需要模擬相移器或者延時(shí)線。這種劃分方法支持 DSP 設(shè)計(jì)人員把發(fā)送和接收通路分解成分立的功能 —— 乘法器、濾波器、用于延時(shí)的 FIFO ,以及加法器,在 MATLAB 中對其進(jìn)行建模,從庫中實(shí)現(xiàn)它們??梢园岩笞羁量痰墓δ芊诺綄iT開發(fā)的 ASIC 、 FPGA 或者 GPU 芯片中,而把要求不太高的運(yùn)算分組成 DSP 芯片或者加速器中的代碼。
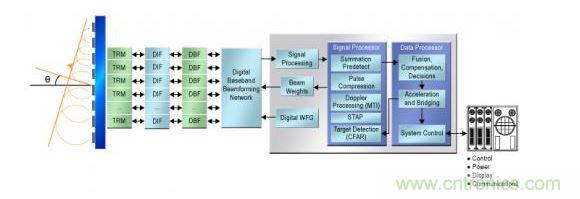
圖 2 .把數(shù)據(jù)轉(zhuǎn)換器放到 IF 級的最后。
需要特別注意信號從聚束網(wǎng)絡(luò)出來后的接收鏈信號處理 , 這是因?yàn)槠浯鎯ζ骱吞幚硇枨髸浅4?, 涉及到的動態(tài)范圍非常寬 —— 從干擾發(fā)射器輸入到搜索探測范圍的每一邊沿。會需要高精度浮點(diǎn)硬件,還需要更強(qiáng)的處理能力。
在其最后級,有目的的對接收鏈進(jìn)行修改并實(shí)現(xiàn)。通過其濾波、聚束和脈沖壓縮級,鏈的任務(wù)是從噪聲中提取出信號,特別是那些可能承載了環(huán)境中實(shí)際目標(biāo)信息的信號。然后,重點(diǎn)從信號轉(zhuǎn)向它們所代表的目標(biāo),任務(wù)的本質(zhì)發(fā)生了改變。
從信號到目標(biāo)
脈沖壓縮是這一抽象過程的開始。在時(shí)間域或者頻域,脈沖壓縮器一般通過自相關(guān)找到有可能含有發(fā)送啁啾的波形。然后,它采用脈沖目標(biāo)來表示這些波形 —— 含有到達(dá)時(shí)間、頻率和相位以及其他相關(guān)數(shù)據(jù)的數(shù)據(jù)包。從這里開始,接收鏈會處理這一數(shù)據(jù)包而不是接收到的信號。
下 一步一般是多普勒處理。首先,脈沖被送入方格陣列中( 圖 3 ) 。在陣列中,每一列含有從某一發(fā)射器啁啾返回的脈沖。陣列中會有很多列,這取決于系統(tǒng)能夠承受多大的延時(shí)。陣列中的行表示返回切換時(shí)間:距離陣列的 x 軸越遠(yuǎn),發(fā)射器啁啾和接收脈沖到達(dá)時(shí)間之間的延時(shí)就越大。這樣,延時(shí)方格也代表了與某一脈沖反射的目標(biāo)的距離。
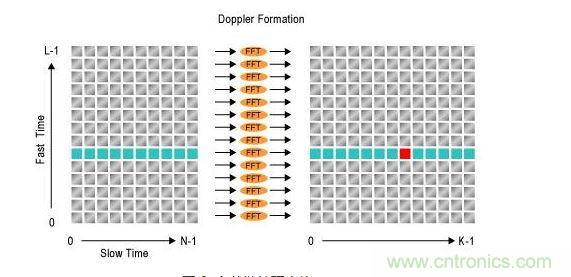
圖 3 .多普勒處理方格。
把一系列啁啾脈沖置入到正確的方格中后 , 多普勒處理程序水平移動數(shù)據(jù) —— 觀察從一個(gè)目標(biāo)返回的脈沖隨時(shí)間的變化 , 提取出相對速度和目標(biāo)頭部信息。這一處理方法需要很大的環(huán)形緩沖,無論某一多普勒算法一次能夠處理多少方格,緩沖都能夠容納所有的方格。
[page]
先進(jìn)系統(tǒng)在陣列中增加了另一個(gè)維度。通過把天線劃分成子陣列,系統(tǒng)可以同時(shí)發(fā)送多個(gè)波束,然后,使用相同的多旁瓣天線方向圖設(shè)置接收器進(jìn)行監(jiān)聽?;蛘?,系統(tǒng) 通過聚束或者使用合成孔徑方法來掃描波束?,F(xiàn)在,當(dāng)裝入壓縮后的脈沖時(shí),系統(tǒng)建立一個(gè)三維方格陣列:一個(gè)軸上是發(fā)送脈沖,第二個(gè)是返回延時(shí),第三個(gè)是波束 方位( 圖 4 ) ?,F(xiàn)在,對于每一路脈沖,我們有兩維或者三維方格陣列,同時(shí)表示距離和方向 —— 表示物理空間。這種存儲器的排列是空時(shí)自適應(yīng)處理 (STAP) 的起點(diǎn)。
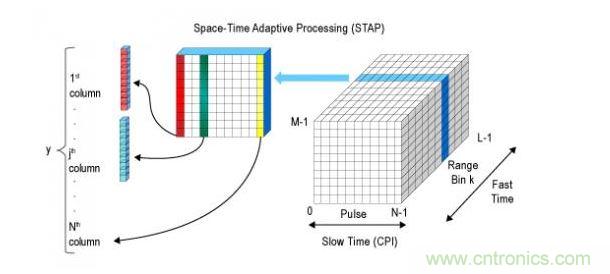
圖 4 .多維方格為STAP建立矩陣。
這一術(shù)語可以解釋為 :“ 空時(shí)” , 數(shù)據(jù)組在 3D 空間統(tǒng)一了目標(biāo)的位置 , 含有與目標(biāo)相關(guān)的啁啾時(shí)間。之所以是“自適應(yīng)”,是因?yàn)樗惴◤臄?shù)據(jù)中獲得自適應(yīng)濾波。
概 念上,實(shí)際情況也是如此,構(gòu)成自適應(yīng)濾波器是一個(gè)矩陣求逆過程:這一數(shù)據(jù)要與哪一矩陣相乘,得到噪聲中隱藏的結(jié)果 ? 據(jù)Altera資深技術(shù)營銷經(jīng)理Michael Parker,推測的隱藏方向圖信息可能來自多普勒處理過程發(fā)現(xiàn)的種子,從其他傳感器采集的數(shù)據(jù),或者來自智能數(shù)據(jù)。運(yùn)行在 CPU 下游的算法把假設(shè)的方向圖插入到矩陣方程中,解出能夠產(chǎn)生預(yù)期數(shù)據(jù)的濾波函數(shù)。
很顯然,在這一點(diǎn),計(jì)算負(fù)載非常大。反變換算法需要的動 態(tài)范圍要求進(jìn)行浮點(diǎn)計(jì)算。對于戰(zhàn)斗環(huán)境中一個(gè)實(shí)際的中等規(guī)模系統(tǒng),必須實(shí)時(shí)進(jìn)行處理,Parker估算了STAP負(fù)載會達(dá)到幾個(gè) TFLOPS 。在采用了低分辨率、窄動態(tài)范圍的系統(tǒng)中,實(shí)時(shí)性要求并不高,例如,簡單的汽車輔助駕駛系統(tǒng)或者合成孔徑映射系統(tǒng)等,這一負(fù)載會顯著減小。
從 STAP ,信息進(jìn)入到通用CPU中,復(fù)雜但是數(shù)字計(jì)算量小,軟件嘗試對目標(biāo)進(jìn)行分類,構(gòu)建環(huán)境模型,估算威脅所在,或者告訴操作員,或者直接采取緊急措施。在這一點(diǎn),我們不但在信號處理域處理信號,而且還進(jìn)入了人工智能領(lǐng)域。
[page]
兩種體系結(jié)構(gòu)
從一名經(jīng)驗(yàn)豐富的雷達(dá)系統(tǒng)設(shè)計(jì)師的角度看,我們還只是膚淺的了解了 AESA 戰(zhàn)斗雷達(dá)。這一參考方法把網(wǎng)絡(luò)看成是相對靜態(tài)的 DSP 鏈,都連接至STA 模塊,其本身是軟件受控的矩陣算術(shù)單元。除此之外,從 DSP 專家的角度看,是一組 CPU 內(nèi)核。
作為對比,汽車或者機(jī)器人系統(tǒng)設(shè)計(jì)人員會從完全不同的角度看系統(tǒng)。從嵌入式設(shè)計(jì)人員的角度看,系統(tǒng)只是一大段軟件,有一些非常專用的 I/O 器件,以及需要進(jìn)行加速的某些任務(wù)。有經(jīng)驗(yàn)的雷達(dá)信號工程師考慮到信號處理和通用硬件的相對規(guī)模,可能會對這一方法不屑一顧。很顯然,機(jī)載多功能雷達(dá)的數(shù) 據(jù)速率、靈活性和動態(tài)范圍要求采用專用 DSP 流水線以及大量的本地緩沖才能完成實(shí)時(shí)處理。但是對于有幾個(gè)天線單元的不同應(yīng)用,簡單的環(huán)境、更短的距離和較低的分辨率,以 CPU 為中心的觀點(diǎn)帶來了一些有意思的問題。
萊斯大學(xué)的 Gene Frantz 教授提出的第一個(gè)問題是,定義真實(shí)環(huán)境的 I/O 。第二個(gè)問題是選擇 CPU 。 Frantz 注意到,“很少只有一個(gè) CPU 。更常見的是異構(gòu)多處理系統(tǒng)。” Frantz 建議這一方法不從 MATLAB 中的 DSP 函數(shù)開始,而是從 C 語言中描述的完整系統(tǒng)開始。然后,以 CPU 為中心的設(shè)計(jì)人員不是定義設(shè)計(jì)中 DSP 和 CPU 域之間的硬件邊界,而是“不斷優(yōu)化并加速 C 代碼。”
實(shí)際結(jié)果可能與以 DSP 為中心的方法完全不同。例如,以 CPU 為中心的方法一開始假設(shè)在一片通用 CPU 上執(zhí)行所有工作。如果速度不夠快,這一方法轉(zhuǎn)向多片 CPU ,共享一個(gè)分層的連續(xù)存儲器。只有當(dāng)多核不足以完成任務(wù)時(shí),這一方法才轉(zhuǎn)向優(yōu)化的硬件加速器。
相似的,以 CPU 為中心的設(shè)計(jì)從假設(shè)一個(gè)統(tǒng)一的存儲器開始。它為每一個(gè)處理器分配連續(xù)高速緩存,為加速器分配本地工作存儲器。它開始時(shí)并不假設(shè)任何硬件流水線,也不把任務(wù)混合映射到硬件資源上。
在要求最嚴(yán)格的應(yīng)用中,同一個(gè)系統(tǒng)設(shè)計(jì)可能會同時(shí)采用兩種體系結(jié)構(gòu)方法。幾乎每一任務(wù)嚴(yán)格的帶寬和計(jì)算需求都導(dǎo)致采用專用硬件流水線和存儲器例化。要求大幅度降低功耗可能會迫使做出采用高精度數(shù)字方法的決定,這使得在任務(wù)之間共享硬件變得越來越復(fù)雜。
精度是 Frantz 強(qiáng)調(diào)的一點(diǎn)。他指出,“把有效位數(shù)減少一半使您能夠?qū)⑿阅芴岣咭粋€(gè)量級。”為降低功耗,您可以對以上這些做出犧牲或者部分犧牲。
Frantz 指出了關(guān)于模擬 / 數(shù)字邊界的問題。他說:“我們需要重新考慮模擬信號處理。三十年以前,我們開始告訴系統(tǒng)設(shè)計(jì)人員只要做好數(shù)據(jù)轉(zhuǎn)換就行,我們采用數(shù)字方法完成其他所有工 作。但是實(shí)際上,在 8 位分辨率,模擬和數(shù)字方法大概是相同的。模擬是不是更好一些 ? 這取決于在您的系統(tǒng)中,‘更好''的含義是什么。”
地 球物理測繪或者自動陸地車輛系統(tǒng)使用的合成孔徑雷達(dá)等窄帶系統(tǒng)會采用與戰(zhàn)斗雷達(dá)完全不同的體系結(jié)構(gòu)。它可以使用模擬濾波器、上變頻器 / 下變頻器以及聚束功能來完成一個(gè)寬帶存儲器系統(tǒng)的所有后續(xù)處理工作,還使用具有浮點(diǎn)加速器和動態(tài)負(fù)載均衡功能的多個(gè)異構(gòu)處理器 ( 圖 5 ) 。
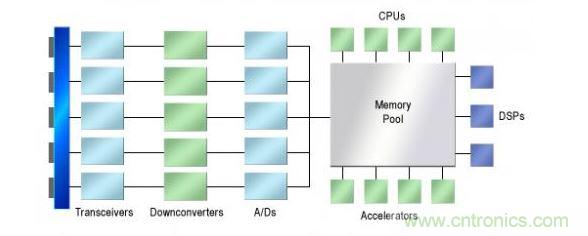
圖 5 .一個(gè)理想的低性能AESA系統(tǒng)。
對信號處理任務(wù)進(jìn)行可視化處理 , 使其在軟件中完成 , 系統(tǒng)設(shè)計(jì)人員獲得了新的運(yùn)行時(shí)選擇 , 例如 , 在任務(wù)之間移動處理資源 , 關(guān)斷不需要的處理器 , 盡早修改算法 ,以便響應(yīng)數(shù)據(jù)碼型 , 或者運(yùn)行多種算法 , 查看哪一種能夠得出最佳結(jié)果。
AESA 雷達(dá)系統(tǒng)不但為研究實(shí)現(xiàn)策略提供了豐富的環(huán)境,而且還提供了方法來研究有大量信號的系統(tǒng)。這些有源陣列分布在軍事等多種設(shè)計(jì)應(yīng)用中,所以,不應(yīng)該局限在傳 統(tǒng)的嵌入式設(shè)計(jì)思路中。因此,對于完全不同的需要大量信號的領(lǐng)域要有新思路,這包括信號智能和網(wǎng)絡(luò)安全等應(yīng)用。這是值得注意的領(lǐng)域。


