
【導(dǎo)讀】本次內(nèi)容介紹DCDC輕載工作模式技術(shù)文章分享給大家,特別是其中的突發(fā)模式作為凌特的專利,很長的一段時(shí)間曾讓很多想設(shè)計(jì)輕載高效的電源IC的公司為之頭痛,如今輕載高效已經(jīng)成為眾多電源IC的一個(gè)基本的要求,有些產(chǎn)品如AOZ3015,12V-5V/10mA的輕載效率已經(jīng)達(dá)到85%以上。
目前高頻高效的DCDC變換器的應(yīng)用越來越廣泛。通常在滿輸出負(fù)載時(shí),DCDC變換器工作于CCM即連續(xù)電流模式。但是,當(dāng)系統(tǒng)的輸出負(fù)載從滿載到輕載然后到空載變化的過程中,系統(tǒng)的工作模式也會(huì)發(fā)生相應(yīng)的改變。
下面以降壓型Buck變換器為例說明DCDC變換器輕載時(shí)的工作模式。降壓型Buck變換器在輕載有三種工作模式:突發(fā)模式、跳脈沖模式和強(qiáng)迫連續(xù)模式。下面將詳細(xì)的闡述了這三種模式的工作作原理及其它們的優(yōu)點(diǎn)及缺點(diǎn)。在實(shí)際的應(yīng)用中,應(yīng)該根據(jù)系統(tǒng)對輸出紋波和效率的具體要求來選取相應(yīng)的工作模式。
1 跳脈沖模式
對于恒定頻率的常規(guī)的非同步Buck控制器,通常電感的電流工作于CCM連續(xù)電流模式,電感的平均電流即為輸出的負(fù)載電流。當(dāng)負(fù)載電流降低時(shí),電感的平均電流也將降低;當(dāng)負(fù)載電流降低時(shí)一定值,變換器進(jìn)入臨界電流模式。此時(shí),若負(fù)載電流進(jìn)一步的降低,電感的電流回到0后,開關(guān)周期還沒有結(jié)束,由于二極管的反向阻斷作用,電感的電流在0值處保持一段時(shí)間,然后開關(guān)周期結(jié)束,進(jìn)入下一個(gè)開在周期,此時(shí)變換器為完全的非連續(xù)電流模式。
變換器進(jìn)入非連續(xù)電流模式后,若負(fù)載電流仍然進(jìn)一步的降低,為了維持輸出電壓的調(diào)節(jié),高端的開關(guān)管的開通時(shí)間將減小,直到達(dá)到控制器的最小導(dǎo)通時(shí)間。高端的開關(guān)管的開通時(shí)間達(dá)到控制器的最小導(dǎo)通時(shí)間后,若負(fù)載電流仍然的降低,控制器就必須屏蔽掉即跳掉一些開關(guān)脈沖,以維持輸出電壓的調(diào)節(jié)。這種控制方法即為跳脈沖模式。
同步的Buck變換器檢測下管的電流,當(dāng)下管的電流接近于0時(shí),系統(tǒng)就工作在非同步的方式,也就是下管不工作,依靠下管內(nèi)部寄生的反并聯(lián)二極管,提供續(xù)流回路。
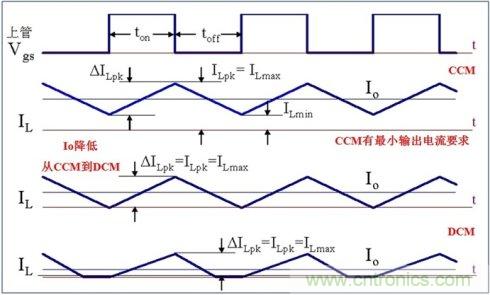
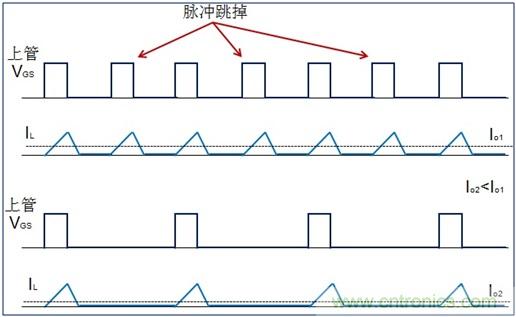
圖1:跳脈沖模式
跳脈沖模式可以在最寬的輸入電流范圍內(nèi)提供恒定頻率的不連續(xù)電流操作,防止反向電感器的電流。由于控制器允許調(diào)節(jié)器跳掉一些不需要的脈沖,相比于連續(xù)模式操作,提高輕載的效率,但其輕載的工作效率不如突發(fā)模式操作,其輕載的輸出紋波不如連續(xù)模式操作。跳脈沖模式的確提供了一種工作效率和噪聲的折衷方案。
2 突發(fā)工作模式
Buck突發(fā)模式的原理圖見圖2所示。VFB為輸出電壓反饋腳,VEA為電壓誤差放大器,VREF為參考電壓,突發(fā)工作模式比較器上限電壓和下限電壓為VH和VL,通過檢測ITH管腳電壓VC來檢測輸出負(fù)載的變化。
正常工作時(shí),系統(tǒng)不會(huì)進(jìn)入突發(fā)工作模式,突發(fā)工作模式比較器不工作,當(dāng)輸出負(fù)載降低時(shí),輸出電壓將提高,VFB相應(yīng)的也提高,由于VEA為負(fù)反饋,因此VC隨之降低。當(dāng)輸出負(fù)載降低到一定的值時(shí),系統(tǒng)進(jìn)入到輕載模式后,突發(fā)工作模式比較器開始工作,接管對ITH管腳電壓VC的控制,突發(fā)工作模式比較器的輸出信號使控制電路將高端MOSFET的輸出驅(qū)動(dòng)關(guān)斷,高端MOSFET停止開關(guān)操作,此時(shí)輸入不再向輸出端傳輸能量,輸出的大電容將維持低的輸出負(fù)載,因此輸出電壓慢慢的降低,VFB相應(yīng)的也降低,VC隨之提高。
輸出電壓繼續(xù)的降低,VFB的電壓相應(yīng)的也繼續(xù)的降低,VC隨之繼續(xù)提高。經(jīng)過一段長的時(shí)間后,VC電壓將增加到等于VH,突發(fā)工作模式比較器輸出信號翻轉(zhuǎn),控制電路使能高端MOSFET的驅(qū)動(dòng)輸出信號,高端MOSFET進(jìn)入開關(guān)操作,系統(tǒng)進(jìn)入正常的PWM操作,由于輸入的能量大于輸出負(fù)載所消耗的能量,因此輸出電壓將隨之提高。
當(dāng)輸出電壓提高到一定值時(shí),VC電壓降低,VC電壓降低到VL時(shí)L,突發(fā)工作模式比較器輸出又一次的翻轉(zhuǎn),重新關(guān)斷高端MOSFET的驅(qū)動(dòng)信號,系統(tǒng)再一次停止工作。如此反復(fù),這種工作模式即為突發(fā)工作模式。
突發(fā)模式比較器控制高端開關(guān)管工作,高端開關(guān)管工作的時(shí)間很短,停止工作的時(shí)間很長,極大的降低了開關(guān)損耗,在此期間,芯片內(nèi)部的許多功能停止工作,減小內(nèi)部靜態(tài)電流的消耗,因此提高系統(tǒng)的效率。
另一方面由于高端開關(guān)管停止工作的時(shí)間很長,輸出電容將維持輸出的負(fù)載的能量,輸出電容的電壓降低幅度較大,因此輸出電容的紋波電壓大,即輸出的紋波電壓大。突發(fā)工作模式比較器的上下門限電壓決定了輸出電壓紋波值。
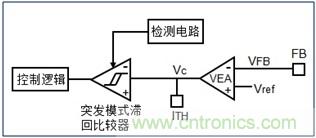
圖2:突發(fā)模式
這種模式和滯回電壓模式有點(diǎn)類似,但不同的是,這種模式通過內(nèi)部的檢測確定輸出負(fù)載的變化,從而決定系統(tǒng)是否進(jìn)入輕載的突發(fā)模式。在突發(fā)模式中,比較器輸出信號翻轉(zhuǎn)系統(tǒng)進(jìn)入正常工作時(shí),系統(tǒng)為正常的定頻PWM工作,高端MOSFET進(jìn)入正常的PWM工作,此時(shí)系統(tǒng)工作在連續(xù)PWM模式或斷續(xù)與連續(xù)PWM并存的模式,能量很快的向輸出傳送,只要工作幾個(gè)周期后便停止工作。
3 強(qiáng)迫連續(xù)模式
強(qiáng)迫連續(xù)模式主要針對于同步Buck變換器,在正常工作時(shí),強(qiáng)迫連續(xù)模式和跳脈沖模式一樣都工作于CCM模式。當(dāng)輸出負(fù)載降低并降低到一定的值時(shí),如前所述,跳脈沖模式將由CCM進(jìn)入DCM模式,在電感的電流為0時(shí)續(xù)流二極管將自然關(guān)斷并維持關(guān)斷的狀態(tài)直到進(jìn)入下一個(gè)開在周期。
對于強(qiáng)迫連續(xù)模式,在電感的電流為0,由于同步開關(guān)管仍然導(dǎo)通,因此輸出的電容電壓將反向加在電感上從而對電感反向激磁,電感的電流將從0反向增加到一定值,然后同步管關(guān)斷,主開關(guān)管導(dǎo)通,輸入電壓加在電感上,電感兩端的電壓為正電壓,電感的電流將從一定負(fù)值正向增加,在過0后繼續(xù)正向增加到一定值,這也是所謂的輸出電流倒灌現(xiàn)象。
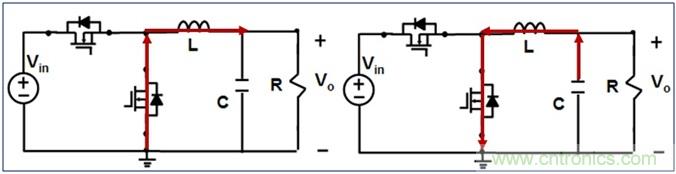
圖3:強(qiáng)迫連續(xù)模式
主開關(guān)管和同步開關(guān)管在每個(gè)開關(guān)周期都在工作,因此開關(guān)的功耗大,系統(tǒng)的效率極低。低輸出負(fù)載條件下,在每個(gè)開關(guān)周期,高端的主開關(guān)導(dǎo)通時(shí),從輸入端向輸出負(fù)載傳輸?shù)哪芰看笥趯?shí)際負(fù)載所需要的能量,因此必須依靠同步開關(guān)管的導(dǎo)通,使輸出電壓對電感反向激磁,從而將多余部分的能量儲(chǔ)存在電感中,以維持輸出的調(diào)節(jié)。這部分的能量只是在電感中來回的交換,并沒有消耗在實(shí)際的負(fù)載中。由于電感有磁損耗(磁芯中的功率損耗)和銅損耗(導(dǎo)線電阻的損耗)能量,因此也進(jìn)一步的降低的效率。然而也正是因?yàn)橹鏖_關(guān)管和同步開關(guān)管在每個(gè)開關(guān)周期都在工作,即使在輕負(fù)載的條件下,在每個(gè)開關(guān)周期,輸入和輸出的能量能夠得到平移,因此輸出電壓的紋波也最小。
這種效率最低的操作模式適合于一些特定的應(yīng)用。在該模式中,輸出可以供電流也可以吸收電流,因此可以應(yīng)用于DDR存儲(chǔ)器的供電。另外,在一些通訊系統(tǒng)中,即使是在輕負(fù)載的條件下仍然需要低的輸出電壓紋波,因此也必須使用此種工作模式,而效率并不是主要的考慮因素。輸出紋波電壓和頻率在整個(gè)負(fù)載變化范圍內(nèi)恒定,容易濾除噪聲,適合于通訊等要求干擾噪聲低的應(yīng)用。在強(qiáng)制連續(xù)模式操作中輸出電流倒灌,然后處于開關(guān)管死區(qū)時(shí)間,電感的電流對輸入電容充電,其電壓提升,設(shè)計(jì)時(shí)要校核實(shí)際的輸入電壓最大值,使其小于相關(guān)元件的額定值。
4 三種模式的結(jié)果比較
設(shè)計(jì)輸入電壓為3.3V,輸出電壓為2.5V的同步Buck變換器,輸出滿負(fù)載電流為Io=1.25A,輕載電流Io=50mA,工作的頻率為1MHz,電感值L=2.2uH,輸出電容選取22uF陶瓷電容。
從圖4可見,在50mA的輕載輸出電流下,系統(tǒng)工作于跳脈沖模式時(shí)電感的電流為DCM模式,每個(gè)開關(guān)周期電感的電流過0并保持一段時(shí)間后才進(jìn)入下一個(gè)開關(guān)周期;系統(tǒng)工作于突發(fā)模式時(shí),主開關(guān)管停止開關(guān)操作的間歇時(shí)間為9uS,然后再開關(guān)操作3uS,輸出的電壓紋波峰峰值高達(dá)20mV;系統(tǒng)工作于強(qiáng)迫連續(xù)模式時(shí),電感的電流過0后繼續(xù)反向增加到-100mA,然后從-100mA正向增加,過0后繼續(xù)正向增加到最大值。輸出的紋波很小,明顯的,電感的環(huán)流將影響系統(tǒng)的效率。
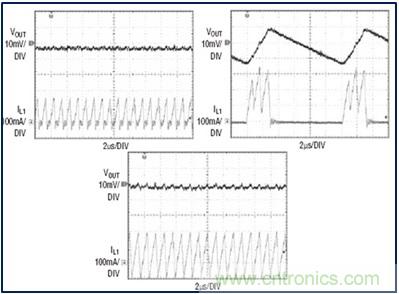
(a)跳脈沖模式 (b)突發(fā)模式 (c)強(qiáng)迫連續(xù)模式
圖4:輕載三種工作模式波形(Vin=3.3V, Vo=2.5V, Io=50mA)
從圖5可以看到三種模式輕載時(shí)的效率和輸出電壓的紋波比較,在三種模式中,突發(fā)模式具有最高的輕載效率和最大的輸出電壓紋波,強(qiáng)迫連續(xù)模式具有最低的輕載效率和最小的輸出電壓紋波,跳脈沖模式則介于二者之間。
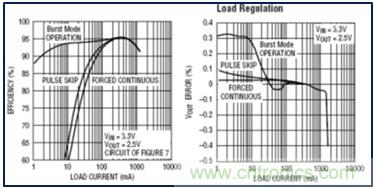
(a)三種模式效率比較 (b)三種模式輸出紋波比較
圖5:輕載三種模式效率和輸出紋波
參考文獻(xiàn):LTC3411數(shù)據(jù)表
推薦閱讀:


