
【導(dǎo)讀】本系統(tǒng)是專為某型舞蹈機(jī)器人設(shè)計(jì)的,軟件的工作大部分是通過(guò)發(fā)送各種指令來(lái)驅(qū)動(dòng)相應(yīng)的電機(jī)以使其轉(zhuǎn)動(dòng),從而實(shí)現(xiàn)預(yù)定編排的舞蹈動(dòng)作。系統(tǒng)在實(shí)際應(yīng)用中具有可靠性高、控制到位、抗干擾性強(qiáng)的特點(diǎn),曾在全國(guó)舞蹈機(jī)器人大賽中一舉奪冠。
機(jī)器人舞蹈比賽是一項(xiàng)具有極強(qiáng)觀賞性和趣味性的比賽。比賽規(guī)則要求參賽機(jī)器人在有限的場(chǎng)地和時(shí)間內(nèi),配合音樂(lè)完成動(dòng)作。由于要求機(jī)器人既要充分利用場(chǎng)地,又不能超時(shí)和越界,因此,舞蹈機(jī)器人集成了多學(xué)科前沿技術(shù),它的設(shè)計(jì)涉及了機(jī)電一體化技術(shù)、檢測(cè)和傳感技術(shù)、精密機(jī)械加工和精密機(jī)械傳動(dòng)技術(shù)、現(xiàn)代化控制技術(shù)和管理技術(shù)、計(jì)算機(jī)程序控制技術(shù)等多個(gè)方面。
系統(tǒng)中,直流電機(jī)共有四路,分別用于機(jī)器人底盤(pán)、頭部的轉(zhuǎn)動(dòng)以及身體的升降,舵機(jī)有兩路,用于花瓣打開(kāi)。本設(shè)計(jì)從實(shí)際出發(fā)對(duì)不同電機(jī)采取了不同的驅(qū)動(dòng)方式。舵機(jī)驅(qū)動(dòng)電流僅十幾微安,可以直接使用單片機(jī)端口進(jìn)行驅(qū)動(dòng),而直流電機(jī)工作電流較大,瞬態(tài)電流接近1A,因此需要采用專用電機(jī)驅(qū)動(dòng)芯片。此外由于采用了3V與7V兩種規(guī)格的直流電機(jī),其中7V直流電機(jī)驅(qū)動(dòng)信號(hào)直接采用驅(qū)動(dòng)芯片輸出,3V直流電機(jī)則需對(duì)驅(qū)動(dòng)芯片輸出作降壓處理,因此,控制芯片選用了Atmel公司的AT89C52單片機(jī)。
驅(qū)動(dòng)模塊電路設(shè)計(jì)
本系統(tǒng)有四路直流電機(jī)和兩路舵機(jī),由于兩者的工作電流相差較大,故在硬件上將兩者獨(dú)立。
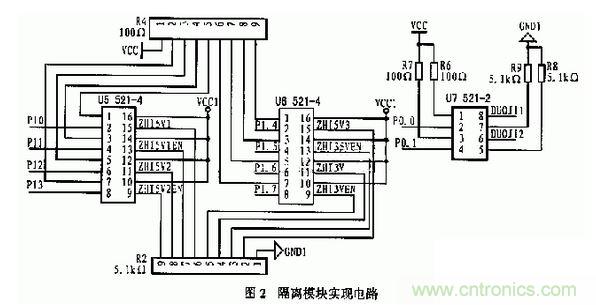
由于舵機(jī)自身帶電源和地引腳,對(duì)其驅(qū)動(dòng)只需給出控制信號(hào)即可,故可直接用單片機(jī)的端口作控制信號(hào)線,因而硬件十分簡(jiǎn)單,設(shè)計(jì)時(shí)只要通過(guò)接口用光耦隔離輸出便可直接控制兩路舵機(jī),圖中即用于實(shí)現(xiàn)這部分功能。本系統(tǒng)共有四路直流電機(jī),其中三路采用7V供電,一路采用3V供電,因而工作電流較大,瞬時(shí)值可達(dá)1A以上,為此,設(shè)計(jì)中選用了L298系列芯片來(lái)完成驅(qū)動(dòng)。圖是兩路電機(jī)的驅(qū)動(dòng)電路,為了節(jié)約單片機(jī)的端口資源,每路直流電機(jī)的正/反轉(zhuǎn)信號(hào)控制線均通過(guò)一個(gè)反相器共用一條單片機(jī)口線。
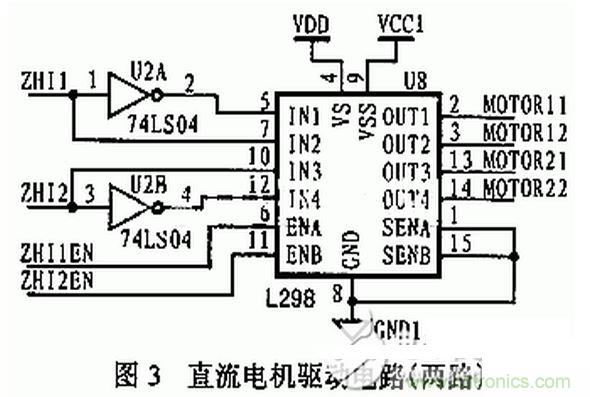
由于本系統(tǒng)中3V直流電機(jī)的工作電流約為800mA,為了簡(jiǎn)化設(shè)計(jì),降低成本,可以考慮直接使用L298N來(lái)驅(qū)動(dòng),而輸出電壓約6V,因此必須將其降至3V才能直接驅(qū)動(dòng)3V直流電機(jī)。本系統(tǒng)僅要求此直流電機(jī)單向轉(zhuǎn)動(dòng),故可采用穩(wěn)壓二極管進(jìn)行穩(wěn)壓處理。利用穩(wěn)壓二極管進(jìn)行穩(wěn)壓時(shí),多采用并聯(lián)型穩(wěn)壓方式。
本系統(tǒng)是專為某型舞蹈機(jī)器人設(shè)計(jì)的,因此,軟件的工作大部分是通過(guò)發(fā)送各種指令來(lái)驅(qū)動(dòng)相應(yīng)的電機(jī)以使其轉(zhuǎn)動(dòng),從而實(shí)現(xiàn)預(yù)定編排的舞蹈動(dòng)作。直流電機(jī)、舵機(jī)的控制均采用PWM方式,軟件設(shè)計(jì)本文不作詳解。系統(tǒng)在實(shí)際應(yīng)用中具有可靠性高、控制到位、抗干擾性強(qiáng)的特點(diǎn),由其構(gòu)成的舞蹈機(jī)器人曾在全國(guó)舞蹈機(jī)器人大賽中一舉奪冠。

