
【導(dǎo)讀】目前行業(yè)在控制精度、分析能力和國(guó)際標(biāo)準(zhǔn)支持三方面實(shí)現(xiàn)了電機(jī)測(cè)試系統(tǒng)的全面革新,用于滿足不同行業(yè)對(duì)電機(jī)測(cè)試的深層次要求,實(shí)現(xiàn)更專業(yè)、更貼合用戶需求的功能定制服務(wù)。下面我們來探討一下電機(jī)測(cè)試平臺(tái)中一個(gè)比較容易忽略的細(xì)節(jié)指標(biāo):控制誤差。
傳統(tǒng)集成廠商主要是通過單純的儀器組合來實(shí)現(xiàn)測(cè)試平臺(tái)搭建,由于缺乏對(duì)測(cè)量原理的深入認(rèn)識(shí)和研發(fā)經(jīng)驗(yàn),難以根據(jù)客戶需求提供完善的功能定制服務(wù)。致遠(yuǎn)電子憑借在功率分析、電機(jī)測(cè)量領(lǐng)域的深入理解與長(zhǎng)久積累,融合儀器設(shè)計(jì)與系統(tǒng)集成的理念,推出了具有劃時(shí)代意義的MPT智能化電機(jī)測(cè)試分析系統(tǒng),在控制精度、分析能力和國(guó)際標(biāo)準(zhǔn)支持三方面實(shí)現(xiàn)了電機(jī)測(cè)試系統(tǒng)的全面革新,用于滿足不同行業(yè)對(duì)電機(jī)測(cè)試的深層次要求,實(shí)現(xiàn)更專業(yè)、更貼合用戶需求的功能定制服務(wù)。
接下來,我們來探討一下電機(jī)測(cè)試平臺(tái)中一個(gè)比較容易忽略的細(xì)節(jié)指標(biāo):控制誤差。
傳統(tǒng)電機(jī)測(cè)試平臺(tái)的控制誤差
傳統(tǒng)電機(jī)測(cè)試平臺(tái)由于只對(duì)電機(jī)轉(zhuǎn)速、轉(zhuǎn)矩進(jìn)行開環(huán)控制,忽略了由夾具和電機(jī)負(fù)載引入的誤差,無法為用戶提供精準(zhǔn)的電機(jī)測(cè)量結(jié)果。
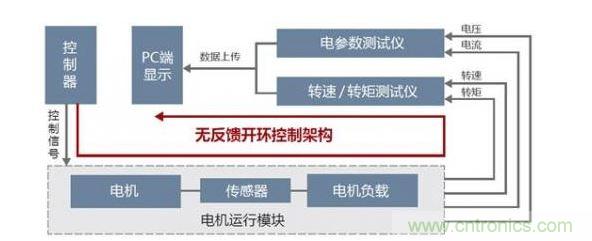
圖1傳統(tǒng)電機(jī)測(cè)試平臺(tái)架構(gòu)圖
誤差出現(xiàn)的原因
電機(jī)測(cè)試系統(tǒng)(測(cè)功機(jī))出現(xiàn)轉(zhuǎn)速和扭矩誤差的原因可總結(jié)為以下三點(diǎn):
1.在電機(jī)拖動(dòng)系統(tǒng)中,電機(jī)輸出的轉(zhuǎn)矩在通過夾具傳遞給傳感器或負(fù)載時(shí),會(huì)有小部分作為摩擦轉(zhuǎn)矩?fù)p耗掉。因此電機(jī)為了正常拖動(dòng)負(fù)載,會(huì)輸出比負(fù)載略大的轉(zhuǎn)矩,造成轉(zhuǎn)矩測(cè)量值與設(shè)定值之間的誤差;
2.電機(jī)負(fù)載自身存在控制誤差,控制信號(hào)與實(shí)際負(fù)載轉(zhuǎn)矩不完全匹配;
3.由于轉(zhuǎn)速和轉(zhuǎn)矩間存在函數(shù)關(guān)系,所以上述兩種誤差同樣會(huì)對(duì)轉(zhuǎn)速產(chǎn)生影響。
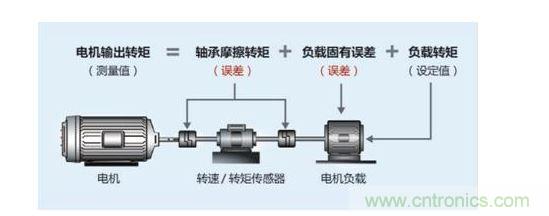
圖2誤差出現(xiàn)的原因
如何保證電機(jī)測(cè)試平臺(tái)的高控制精度?
致遠(yuǎn)電子MPT電機(jī)測(cè)試系統(tǒng)采用先進(jìn)的智能PID控制架構(gòu),由專業(yè)電機(jī)測(cè)試軟件MotorTest、電機(jī)運(yùn)行模塊和高精度功率分析儀三部分組成一個(gè)閉環(huán)反饋系統(tǒng),電機(jī)轉(zhuǎn)速、轉(zhuǎn)矩控制精度高達(dá)0.5%,為用戶提供最為精準(zhǔn)的電機(jī)性能分析。
在測(cè)試過程中,高精度功率分析儀對(duì)電機(jī)的轉(zhuǎn)速、轉(zhuǎn)矩進(jìn)行實(shí)時(shí)測(cè)量,上傳到MotorTest軟件對(duì)測(cè)試數(shù)據(jù)與設(shè)定值進(jìn)行比對(duì),若兩者有偏差,系統(tǒng)控制模塊則對(duì)電機(jī)的轉(zhuǎn)速轉(zhuǎn)矩進(jìn)行負(fù)反饋調(diào)節(jié),然后再次進(jìn)行采樣比對(duì),直至測(cè)試數(shù)據(jù)與設(shè)定值在精度范圍內(nèi)一致,再開始進(jìn)行系統(tǒng)測(cè)試與分析,真實(shí)呈現(xiàn)電機(jī)性能。
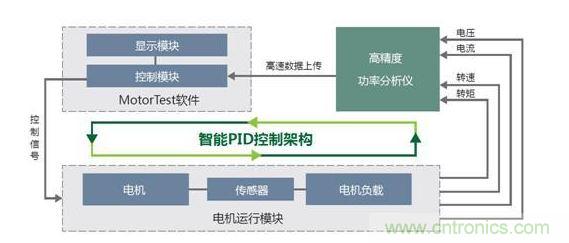
圖3 MPT電機(jī)測(cè)試系統(tǒng)架構(gòu)圖
實(shí)測(cè)案例
以電機(jī)特性曲線測(cè)試為例:用戶設(shè)定轉(zhuǎn)矩為10~100N.m時(shí),傳統(tǒng)電機(jī)測(cè)試平臺(tái)的偏差高達(dá)5%,而MPT電機(jī)測(cè)試系統(tǒng)的轉(zhuǎn)矩控制誤差低至0.36%,滿足用戶對(duì)電機(jī)特性進(jìn)行精準(zhǔn)分析的需要。
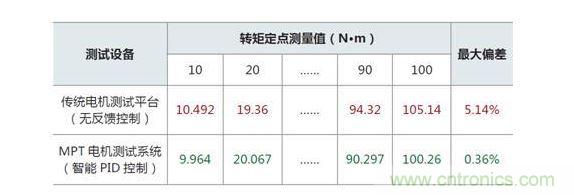
圖4實(shí)測(cè)案例

