
【導(dǎo)讀】經(jīng)典的四電阻差分放大器可以解決許多測量難題。但是,總有一些應(yīng)用需要的靈活性比這些放大器所能提供的更高。由于在差分放大器中電阻匹配直接影響到增益誤差和共模抑制比(CMRR),所以將這些電阻集成到同一個裸片上可以實現(xiàn)高性能。但是,僅僅依靠內(nèi)部電阻來設(shè)置增益,用戶就無法在制造商的設(shè)計選擇之外靈活選擇自己想要的增益。
Q:我們能夠增加固定增益差分放大器的增益嗎?
A:可以,通過增加更多的電阻。
經(jīng)典的四電阻差分放大器可以解決許多測量難題。但是,總有一些應(yīng)用需要的靈活性比這些放大器所能提供的更高。由于在差分放大器中電阻匹配直接影響到增益誤差和共模抑制比(CMRR),所以將這些電阻集成到同一個裸片上可以實現(xiàn)高性能。但是,僅僅依靠內(nèi)部電阻來設(shè)置增益,用戶就無法在制造商的設(shè)計選擇之外靈活選擇自己想要的增益。
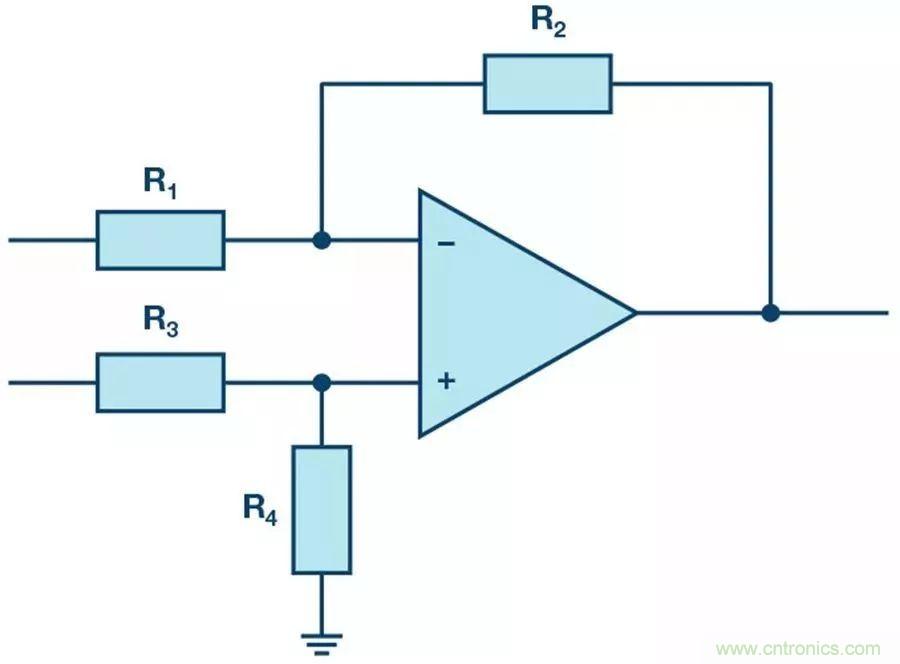
在信號鏈中使用固定增益放大器時,如果需要更多的增益,通常會添加另一個放大器級來實現(xiàn)所需的總增益。雖然這種方法非常有效,但它會增加整體的復(fù)雜性、所需的板空間、噪音、成本等?;蛘?,您可以選擇另一種方法,在不增加第二個增益級的情況下增加系統(tǒng)增益。通過在固定增益放大器上增加幾個電阻來提供正反饋路徑,此舉可以減少整體的負(fù)反饋,從而獲得更高的整體增益。
在典型的負(fù)反饋配置中,反饋給反相輸入的輸出部分被稱為β,電路的增益為1/β。β=1時,整個輸出信號被返回給反相輸入端,由此實現(xiàn)單位增益緩沖器。β值較低時,實現(xiàn)的增益較高。
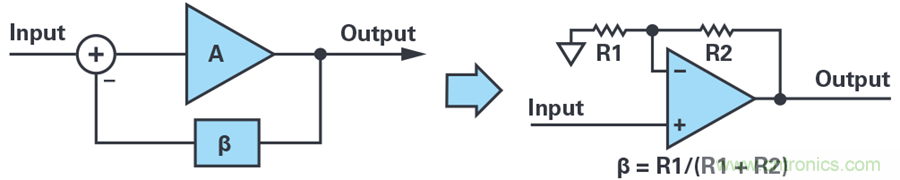
圖1. 負(fù)反饋:非反相運算放大器配置
為了提高增益,必須降低β。這可以通過增加R2/R1的比率來實現(xiàn)。但是,目前對于固定增益的的差動放大器還沒有辦法通過降低其傳輸?shù)椒聪喽说姆答亖硖岣哒w增益,因為這需要用到更大的反饋電阻或更小的輸入電阻。通過將輸出反饋提供給差動放大器的基準(zhǔn)引腳,也就是同相輸入端,即可提高之前的固 定增益放大器的增益。此放大電路產(chǎn)生的復(fù)合反饋系數(shù)β(βc)是β-和β+之間的差值,該系數(shù)同時也將決定放大電路的增益和帶寬。請注意,β+提供的是正反饋,因此必須確保凈反饋仍然為負(fù)(β– > β+)。
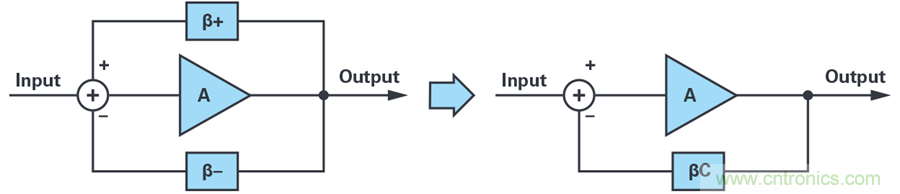
圖2. 組合β
為了使用β+調(diào)節(jié)電路增益,第一步是計算β-(初始電路的β)。注意,衰減項G_attn是差動放大器的正輸入信號與運算放大器的同相端輸入之比。

一旦選定所需的增益,就可以確定所需的β以及β+。因為固定增益放大器的增益是已知的,所以能夠很簡單地計算出β。

β+的量正好是輸出信號返回至運算放大器的同相輸入端的一部分。記住,反饋會通過β+路徑至基準(zhǔn)引腳,反饋信號會通過兩個電阻的分壓器(見圖3),這兩個分壓電阻阻值必須要通過計算才能實現(xiàn)正確的β+。
差動放大器的一個關(guān)鍵特性是CMRR。正極和負(fù)極網(wǎng)絡(luò)上的電阻比是否匹配對于能否實現(xiàn)出色的CMRR至關(guān)重要,因此電阻(R5)也應(yīng)該與正輸入電阻串聯(lián),以平衡基準(zhǔn)引腳上增加的電阻。
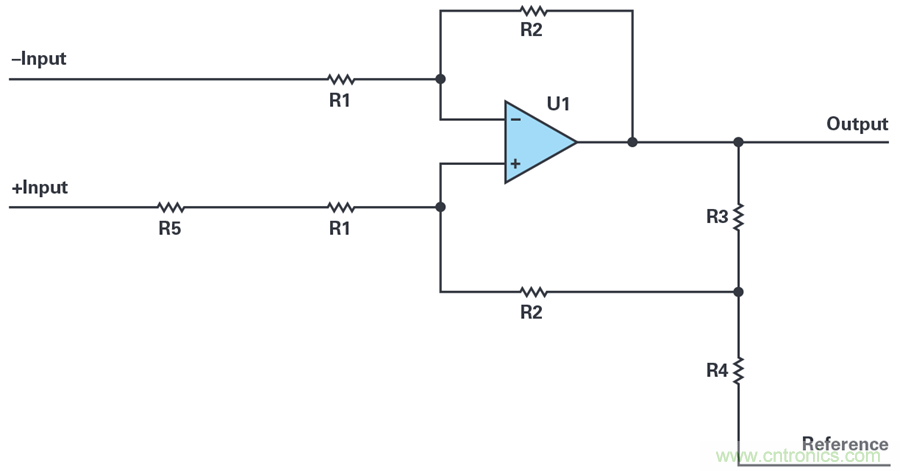
圖3. 四電阻固定增益差分放大器:增益調(diào)整
為了確定電阻R3和R4,可以使用戴維南等效電路來簡化分析。
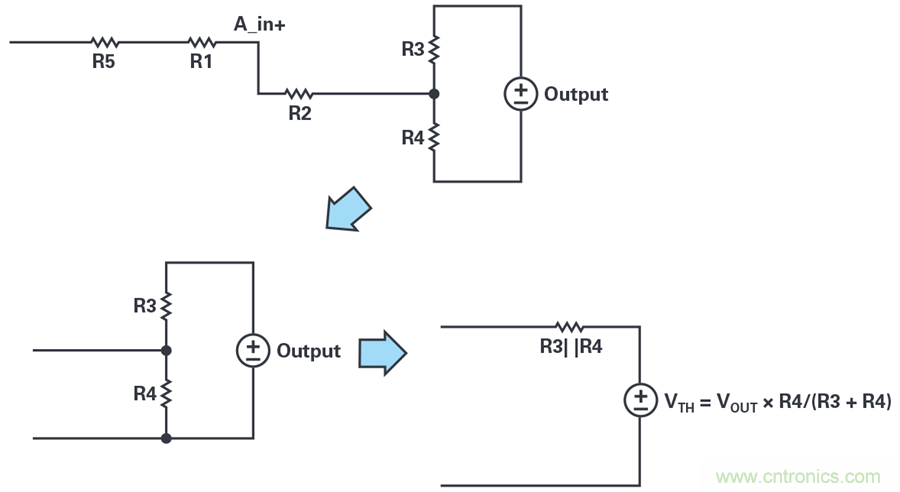
圖4. 戴維南等效電路
如上所述,為了保持良好的CMRR,必須添加R5。R5的值由R3和R4的并聯(lián)組合決定,其系數(shù)與輸入衰減器中的電阻相同。因為R1/R2 = (1/G_attn) - 1這個比率,R1和R5分別可以用比率已定的R2和R3||R4代替。
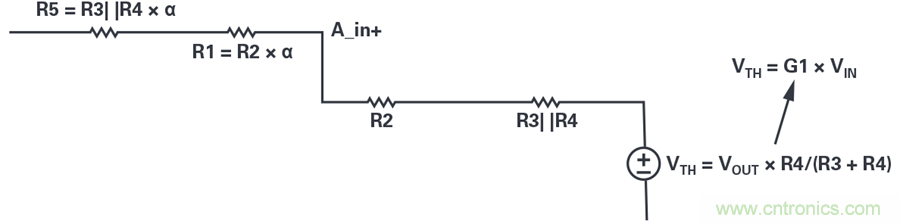
圖5. 經(jīng)過簡化的正輸入電阻網(wǎng)絡(luò)
如前所述, VOUT至簡化電路的A_in+的增益必須等于1/β+。
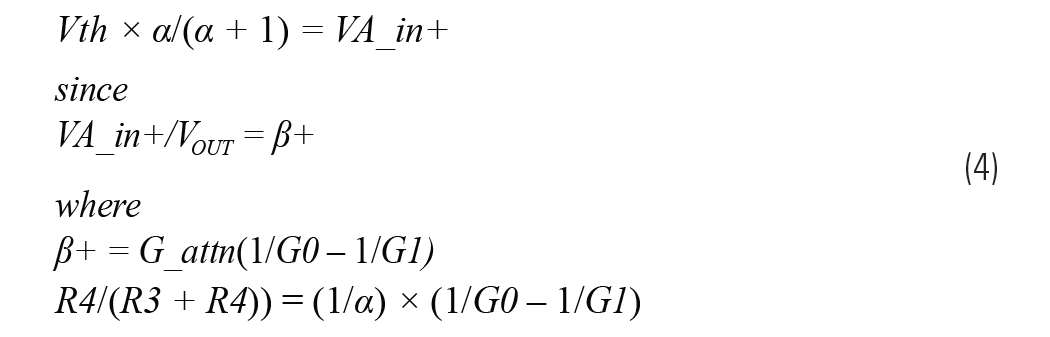
由于R3和R4拉載運算放大器,所以應(yīng)該注意不要選擇太小的值。一旦選定了所需的負(fù)載(R3 + R4),就可以利用公式4輕松計 算得出R3和R4的值。R3和R4確定之后,可以利用R3||R4 × β計算得出R5。
因為這種技術(shù)依賴于電阻比,所以具備很高的靈活性。在噪聲和功耗之間需要進行權(quán)衡,電阻值應(yīng)該足夠大,可以防止運算放大器過載。此外,由于R5與R3和R4成比例,所以應(yīng)該使用相同類型的電阻,以在各種溫度下保持良好性能。如果R3、R4和R5一起漂移,那么這個比例將保持不變,并且由于這些電阻,即使有熱漂移,也會保持在最低水平。最后,由于運算放大器的增益更高,所以獲得的帶寬會按照增益帶寬積的βc/β比例降低。
AD8479可以實現(xiàn)這種技術(shù)的典型應(yīng)用,它是一個單位增益 的高共模差動放大器。AD8479能夠在±600 V共模下測量差分信號,并且具有固定的單位增益。有些應(yīng)用需要的增益大于單位增益,因此很適合采用之前提到的技術(shù)。電流檢測應(yīng)用需要的 另一個常見增益是10,因此可以讓G1 = 10。
由于AD8479會衰減共模信號,獲得更高的差分信號,然后獲得單位系統(tǒng)增益,所以在實施增益調(diào)整時需要考慮這一點。
由于正基準(zhǔn)的增益為60,正輸入的增益為1,所以電路的噪聲增益為61。此外,由于總體增益是一致的,所以G_attn必須是1/噪聲增益:

R3和R4可以使用公式6計算得出:
AD8479的增益為指定增益,負(fù)載為2 kΩ,所以R3 + R4的目標(biāo)增益如下。
為了使用標(biāo)準(zhǔn)電阻值構(gòu)建這個電阻,所以需要使用并聯(lián)電阻來實現(xiàn)比使用單個標(biāo)準(zhǔn)電阻可以實現(xiàn)的更準(zhǔn)確的比例。
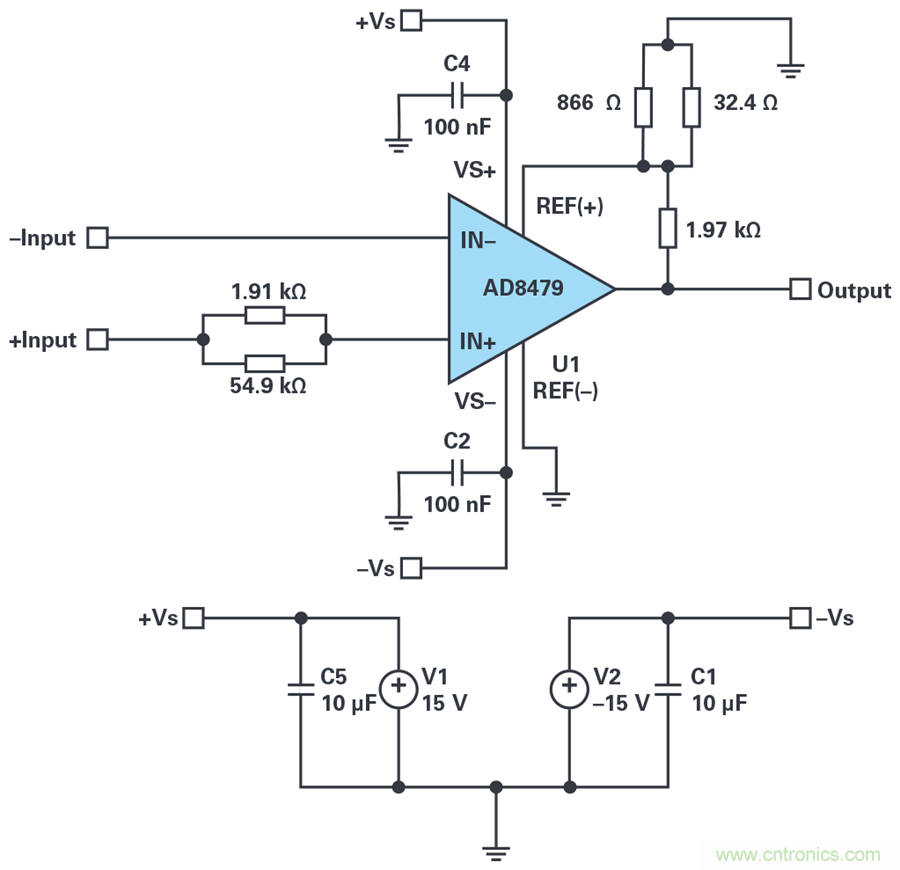
圖6. G = 10時,AD8479的最終原理圖
從圖7中可以看出,獲得的輸出(藍(lán)色)是預(yù)期輸入(黃色)的10倍。

圖7. G = 10時,AD8479的輸入和輸出示波器捕捉圖
增益為10的電路的標(biāo)稱帶寬應(yīng)為典型的AD8479帶寬的1/10,這是因為βc/β– = 1/10,而實際測量的–3 dB頻率為48 kHz。

圖8. G = 10: –3 dB頻率時的AD8479
圖9顯示獲得的脈沖響應(yīng)和特征與預(yù)期一致。壓擺率與標(biāo)準(zhǔn)的AD8479壓擺率一致,但因為帶寬減小,所需的建立時間更長。
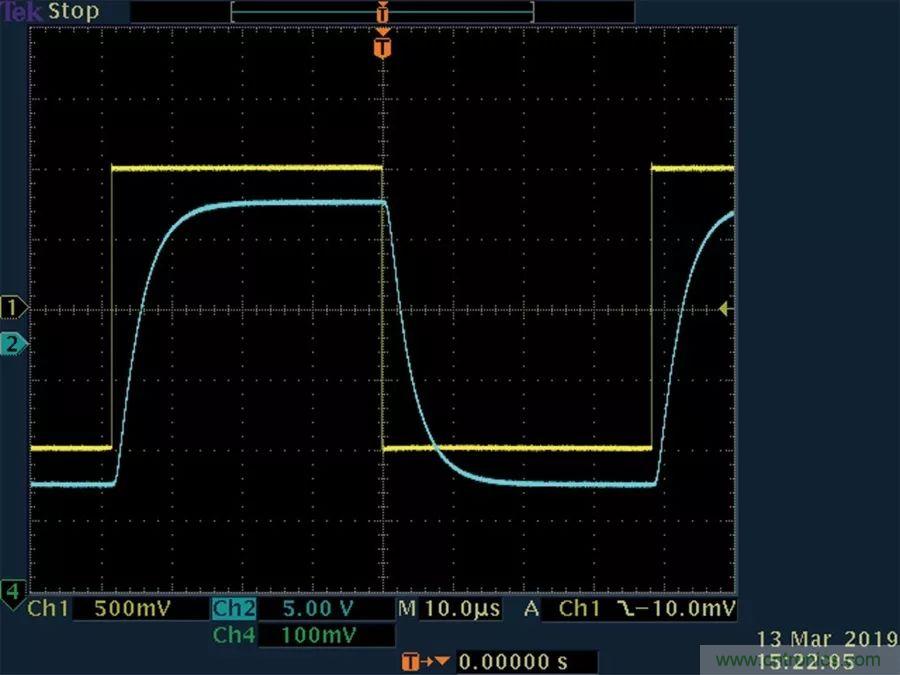
圖9. G = 10: 脈沖響應(yīng)時的AD8479
由于新電路為運算放大器的兩個輸入端提供反饋,所以運算放大器的共模會受到兩個輸入端的信號影響。這會改變電路的輸入電壓范圍,因此應(yīng)該對其進行評估,以免過度驅(qū)動運算放大器。此外,由于噪聲增益增加,所以輸出端的噪聲電壓頻譜和峰峰值也會按相同比例增加;但是,當(dāng)信號被引用到輸入時, 產(chǎn)生的影響可以忽略不計。最后,增益增加的電路的CMRR與前一個電路的CMRR相等(假設(shè)R3、R4和R5電阻不會額外增加共模誤差)。由于R5是用于在增加R3和R4的情況下來修正CMRR的,所以可以對CMRR進行調(diào)優(yōu),使其比原來使用R5的電路更好。但是,這需要進行微調(diào),且在此過程中,您需要適當(dāng)權(quán)衡和調(diào)整CMRR的增益誤差。
實施這個過程時,您可以利用固定增益差分放大器的優(yōu)點,而不受其固定特性限制。由于該技術(shù)是通用的,它還可以和許多其他差分放大器一起使用。在不增加任何有源組件的情況下,簡單增加三個電阻可以在信號鏈中實現(xiàn)更高的靈活性,這有助于降低成本、復(fù)雜性和電路板大小。
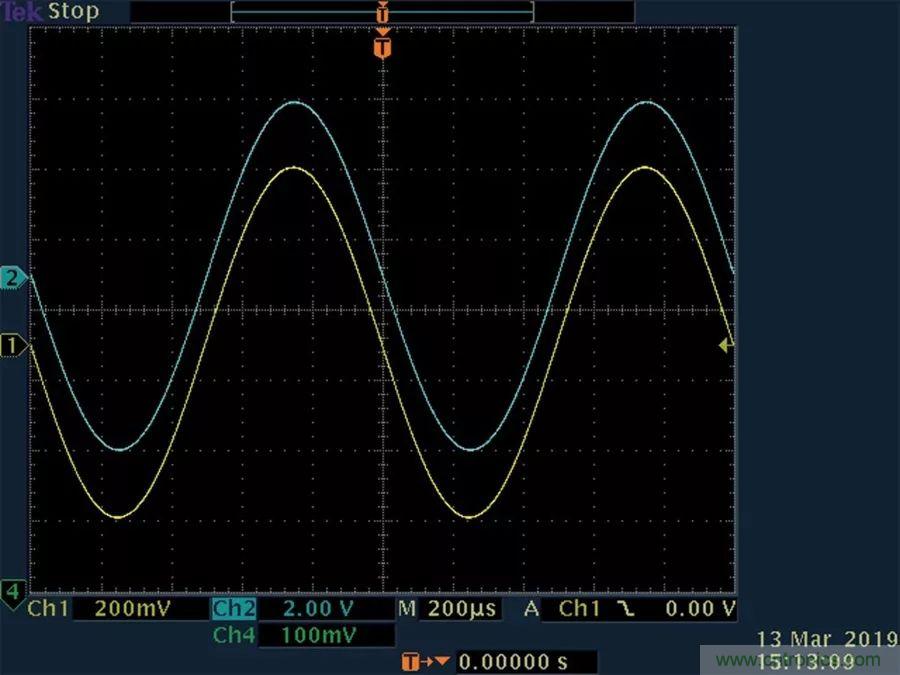
圖7. G = 10時,AD8479的輸入和輸出示波器捕捉圖
增益為10的電路的標(biāo)稱帶寬應(yīng)為典型的AD8479帶寬的1/10,這是因為βc/β– = 1/10,而實際測量的–3 dB頻率為48 kHz。

圖8. G = 10: –3 dB頻率時的AD8479
圖9顯示獲得的脈沖響應(yīng)和特征與預(yù)期一致。壓擺率與標(biāo)準(zhǔn)的AD8479壓擺率一致,但因為帶寬減小,所需的建立時間更長。
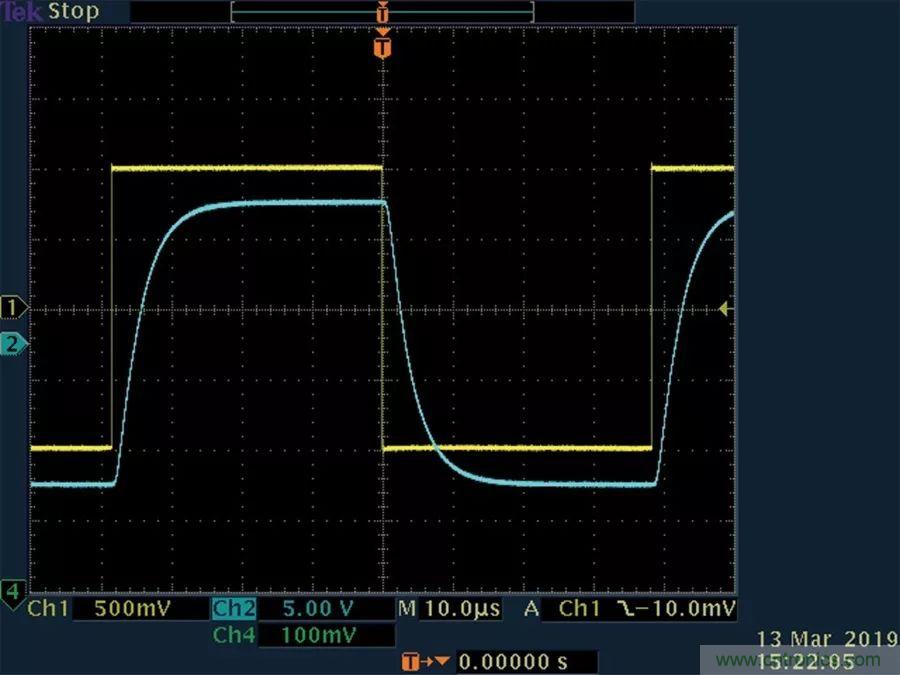
圖9. G = 10: 脈沖響應(yīng)時的AD8479
由于新電路為運算放大器的兩個輸入端提供反饋,所以運算放大器的共模會受到兩個輸入端的信號影響。這會改變電路的輸入電壓范圍,因此應(yīng)該對其進行評估,以免過度驅(qū)動運算放大器。此外,由于噪聲增益增加,所以輸出端的噪聲電壓頻譜和峰峰值也會按相同比例增加;但是,當(dāng)信號被引用到輸入時, 產(chǎn)生的影響可以忽略不計。最后,增益增加的電路的CMRR與前一個電路的CMRR相等(假設(shè)R3、R4和R5電阻不會額外增加共模誤差)。由于R5是用于在增加R3和R4的情況下來修正CMRR的,所以可以對CMRR進行調(diào)優(yōu),使其比原來使用R5的電路更好。但是,這需要進行微調(diào),且在此過程中,您需要適當(dāng)權(quán)衡和調(diào)整CMRR的增益誤差。
AD8479
● 共模電壓范圍:±600 V
● 軌到軌輸出
● 固定增益:1
● 寬電源范圍:±2.5 V至±18 V
● 電源電流:550 μA(典型值)
● 出色的交流規(guī)格
● 共模抑制比(CMRR):90 dB(最小值)
● 310 kHz帶寬
● 高精度直流性能
● 增益非線性度:5 ppm(最大值)
● 失調(diào)電壓漂移:10 µV/°C(最大值)
● 增益漂移:5 ppm/°C(最大值)
實施這個過程時,您可以利用固定增益差分放大器的優(yōu)點,而不受其固定特性限制。由于該技術(shù)是通用的,它還可以和許多其他差分放大器一起使用。在不增加任何有源組件的情況下,簡單增加三個電阻可以在信號鏈中實現(xiàn)更高的靈活性,這有助于降低成本、復(fù)雜性和電路板大小。
推薦閱讀:

