
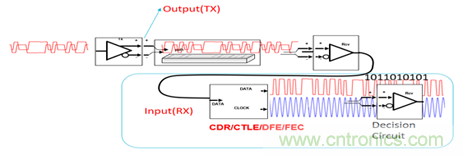
【導(dǎo)讀】在用戶進(jìn)行系統(tǒng)或者芯片測試的時候,一般主要驗(yàn)證幾個方面的性能和可靠性,包括系統(tǒng)發(fā)送端的信號質(zhì)量,鏈路的損耗/串?dāng)_,接收端的容限。如下圖1,一個鏈路系統(tǒng)的基本架構(gòu)。通常在發(fā)送端會使用FFE來補(bǔ)償鏈路的損耗,接收端會采用DFE/FFE等方法來進(jìn)行均衡,一些比較高速率的標(biāo)準(zhǔn)如PCIE 4.0/5.0,SAS4等還會采用FEC來進(jìn)行糾錯,當(dāng)然接收端還需要CDR來從串行信號里面進(jìn)行時鐘恢復(fù)得到同步時鐘來對信號進(jìn)行采樣。
圖1:高速串行鏈路的基本架構(gòu)
對于系統(tǒng)/芯片的接收端測試,會有幾個方面的挑戰(zhàn),第一是loopback (環(huán)回)模式的Training,第二是link(鏈路)training。只有這兩個部分的協(xié)商正確完成的前提下,才能保證測試的順利完成。不管是loopback training 還是link training,都要求Bert具備和被測設(shè)備自動的協(xié)商功能,通過基于協(xié)議的握手和雙向溝通去使被測設(shè)備進(jìn)入環(huán)回模式和均衡的自適應(yīng)。
如圖二,支持各種協(xié)議的系統(tǒng)/芯片在上電后會通過與對端設(shè)備的多次協(xié)商進(jìn)入不同的子狀態(tài)機(jī),在接收端容限測試的時候需要使被測芯片的狀態(tài)機(jī)從Config或者Recovery狀態(tài)進(jìn)入loopback的子狀態(tài),這個實(shí)現(xiàn)需要Bert模擬一個真正的對端設(shè)備去發(fā)送符合該協(xié)議的碼型系列去training 被測設(shè)備。同時Bert也要能實(shí)時的解析被測設(shè)備的協(xié)議系列以確認(rèn)其是否被成功training,否則需要重新修改設(shè)置來發(fā)送training的碼型序列。如圖3,泰克的BSX系列誤碼儀最高可以支持單通道32Gbps的實(shí)時數(shù)據(jù)發(fā)送和接收,可以直接產(chǎn)生和接收并同時解析協(xié)議的數(shù)據(jù)包,而不像其他廠商只能在較低速的時候?qū)崿F(xiàn)數(shù)據(jù)直接產(chǎn)生和接收,而高速標(biāo)準(zhǔn)則需要通過兩個通道合并成單通道進(jìn)行發(fā)送,并在接收端則將單通道再分解成兩個通道進(jìn)行接收。這樣會導(dǎo)致高速標(biāo)準(zhǔn)的時候不能實(shí)現(xiàn)真正基于協(xié)議的協(xié)商。
圖2:PCIe/USB3.1等協(xié)議標(biāo)準(zhǔn)的各種狀態(tài)機(jī)。
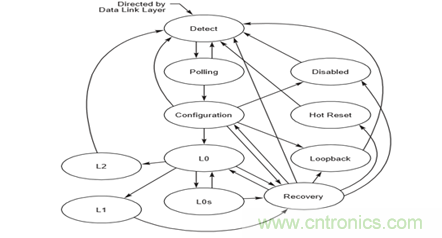
圖3:BSX系列誤碼儀支持單通道的高速協(xié)議數(shù)據(jù)的發(fā)送和接收解析
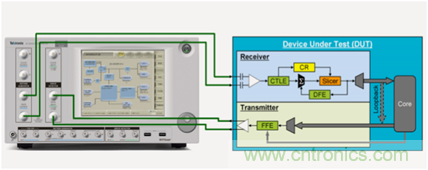
如圖3,除了loopback training以外,另一個重要的步驟是link training(鏈路協(xié)商),需要Bert和DUT進(jìn)行FFE/DFE的實(shí)時協(xié)商來補(bǔ)償鏈路的損耗,以達(dá)到最低的誤碼率。在USB3.1/PCIe協(xié)議中發(fā)送端會有多個級別的FFE來靈活對信號發(fā)送端進(jìn)行均衡補(bǔ)償,在接收端也會有CTLE和DFE多級組合來進(jìn)行補(bǔ)償。(詳細(xì)的鏈路協(xié)商步驟細(xì)節(jié)可以參考泰克的相關(guān)應(yīng)用文章-《克服第4代I/O應(yīng)用中的接收機(jī)測試挑戰(zhàn)》)。這個鏈路協(xié)商同樣需要Bert能夠在一定程度上去模擬一個真實(shí)設(shè)備和被測設(shè)備進(jìn)行溝通,解析并響應(yīng)被測設(shè)備的要求去調(diào)節(jié)信號輸出的FFE參數(shù),并根據(jù)誤碼率來請求被測設(shè)備調(diào)節(jié)其輸出的FFE參數(shù)和接收端的CTLE/DFE參數(shù),以達(dá)到最佳的誤碼率。同樣這個時候也需要BERT具備單通道直接輸出和接收并解析基于協(xié)議的碼型序列達(dá)到與被測設(shè)備的實(shí)時協(xié)商。
除了進(jìn)行一致性測試以外,對于芯片的驗(yàn)證過程中還經(jīng)常會進(jìn)行問題定位,當(dāng)出現(xiàn)誤碼的時候,大部分工程師會去搬一臺示波器來使用示波器觀察信號波形來進(jìn)行抖動和眼圖分析來進(jìn)行調(diào)試,這時候得把信號重新連接到示波器來進(jìn)行信號的捕獲,而且并不容易把誤碼和示波器捕獲的波形直接關(guān)聯(lián)起來找到誤碼的原因。往往你旁邊并沒有一臺高帶寬示波器供你隨意使用。由于泰克的BSX系列誤碼儀能夠精確的統(tǒng)計(jì)誤碼的個數(shù)和誤碼出現(xiàn)的時間,所以能夠?qū)崿F(xiàn)精準(zhǔn)的誤碼定位。這個強(qiáng)大的誤碼定位功能和抖動眼圖分析功能可以供你進(jìn)行系統(tǒng)和芯片級別的調(diào)試,下面會舉一些真實(shí)用戶使用Bert進(jìn)行調(diào)試分析的實(shí)例來說明。
案例一:使用誤碼儀Error Free interval功能來驗(yàn)證芯片的自適應(yīng)時間。
客戶在做芯片IP的選型驗(yàn)證,該芯片支持的速率為20.62bps,不同IP廠商會給出不同的芯片自適應(yīng)時間,一般為幾百微妙到幾百毫秒不等,如前面所述,有一些芯片的關(guān)鍵參數(shù)會影響到這個自適應(yīng)時間,如芯片的FFE/DFE的均衡自適應(yīng)時間,CDR的鎖定時間,誤碼判決電路的采樣點(diǎn)的自動調(diào)節(jié)等??蛻舻男枨笫菧y試從芯片開始初始化那一刻直至誤碼率低至10^-12左右的時間。
圖4:連接拓?fù)鋱D
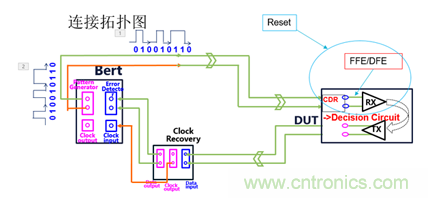
先按照上面圖4的連接圖連接好,將被測芯片設(shè)置為環(huán)回模式,設(shè)置Bertscope的PG輸出為被測速率,碼型設(shè)置為PRBS31,確認(rèn)CDR模塊可以正確鎖定,Error Detector能夠正確的Sync碼型,并且測試沒有誤碼。將Bert 的Error Detector端設(shè)置為Auto-resync。
然后選擇Bert scope的View里面的誤碼分析功能(Error analysis),選擇Error free interval。點(diǎn)擊Error free interval界面,設(shè)置,Hist的end 為500000(bit),這個參數(shù)需要根據(jù)芯片的特性靈活調(diào)節(jié),如果芯片的自適應(yīng)時間較長,則可以適當(dāng)增加,以保證整個自適應(yīng)過程的誤碼變化情況都能夠在所選的時間范圍之內(nèi)。這個界面的橫軸是bit,可以根據(jù)信號的速率轉(zhuǎn)化為絕對的時間,縱軸是誤碼個數(shù)。我們可以根據(jù)誤碼的變化從而計(jì)算出自適應(yīng)的收斂時間。設(shè)置好以后點(diǎn)擊auto center。然后點(diǎn)擊Run。
設(shè)置好誤碼儀后,用命令將芯片的RX部分進(jìn)行一次hot reset,這時候芯片會進(jìn)行一次時鐘恢復(fù)的同步,重新調(diào)節(jié)DFE,F(xiàn)FE,在Bertscope的Error Free interval里面就可以看到出現(xiàn)大量誤碼然后再慢慢減少到?jīng)]有誤碼的過程。在300000bit左右就不再出現(xiàn)誤碼,表示這個時候自適應(yīng)過程就已經(jīng)完成。為了保證測試結(jié)果的重復(fù)性和一致性,建議將這個hot reset的過程做十次,Error free interval會自動將這十次的結(jié)果進(jìn)行疊加。從測試的結(jié)果看,芯片的自適應(yīng)時間約為250000X(1/20.62G)約為12.5us左右。
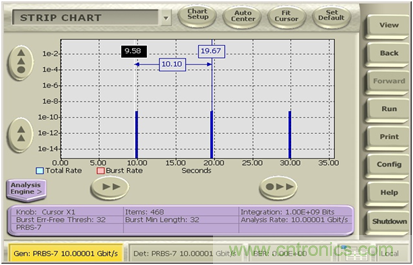
案例二:使用誤碼的Strip chart的記錄功能來進(jìn)行長時間的誤碼分析。
由于客戶的系統(tǒng)要進(jìn)行長時間的(-20到+80度下)的高低溫老化測試,客戶要看誤碼的性能和溫度變化的相關(guān)性,一般的誤碼儀只能統(tǒng)計(jì)溫度變化過程中誤碼的總的個數(shù)和誤碼率,而無法得知在整個十幾個小時里面任一時刻誤碼率的變化。而BSX系列誤碼儀則可以使用Strip chart的記錄功能將整個過程中記錄下來,后面可以根據(jù)需要查詢?nèi)我鈺r刻的誤碼率變化情況。如下圖,在第10/20/30秒的時間點(diǎn)出現(xiàn)了一些突發(fā)的誤碼,這個如果僅僅是通過簡單的誤碼統(tǒng)計(jì)是無法看到時間相關(guān)的細(xì)節(jié)的,而且其累積記錄時間可以長達(dá)幾十小時甚至幾天。
圖5:使用Strip chart功能記錄整個長時間老化過程誤碼變化
案例四:使用誤碼儀的眼圖和抖動分析功能進(jìn)行信號特性的分析。
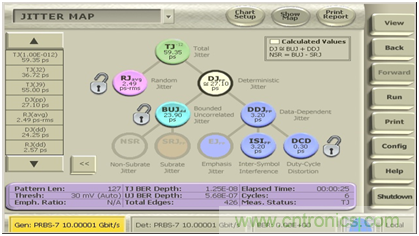
1.客戶在測試誤碼的同時想快捷的觀察TX端輸出信號的質(zhì)量,確保芯片輸出的信號是否滿足一定的要求。2.客戶想真正的測試10^12次方下的總體抖動的值,因?yàn)橐话闶静ㄆ鞯腡j都是通過測量RJ和DJ然后再通過一定的外推算法去得到10^12 次方下的抖動的,由于示波器存儲深度和計(jì)算時間的限制,無法得到真正的Tj@10^12。但誤碼儀是可以通過連續(xù)bit的測量從而得到真正的10^12的抖動的,并且其內(nèi)置的帶有兩個1bit的ADC在實(shí)時全速的對每個bit進(jìn)行掃描和比較,所以能夠快速的得到信號的眼圖(如圖7)。并根據(jù)每個bit的與采樣點(diǎn)的偏差計(jì)算該bit的TIE的抖動偏移量,從而通過算法計(jì)算信號的Rj/Dj并進(jìn)行抖動的進(jìn)一步細(xì)分。同時由于BSX系列的誤碼檢測輸入端的帶寬高達(dá)22GHz以上,所以對高速信號的眼圖和抖動分析的精度非常高。
圖6:Bertscope的誤碼檢測端自帶的兩個1bit ADC的比較器
圖7:眼圖分析功能

圖8:抖動分析功能
案例五:使用誤碼儀的FEC emulation 功能快速模擬芯片的FEC算法。
由于現(xiàn)在芯片和標(biāo)準(zhǔn)的速率越來越高,為了加強(qiáng)容錯能力,如SAS4/PCIe 4.0/5.0/25G以太網(wǎng)的標(biāo)準(zhǔn)都廣泛使用了FEC來進(jìn)行糾錯,即便是犧牲了一些額外的開銷,但能夠很大的降低誤碼率,也是值得的。
客戶的芯片的接收端可以支持FEC的糾錯功能,但要測試在不同的channel條件和不同的發(fā)送端均衡的設(shè)定下,芯片經(jīng)過FEC后的誤碼率能降低到多少,如果將信號直接環(huán)回到芯片的輸入端的話,需要不停的修改芯片的FEC的參數(shù)來進(jìn)行測試,但由于其芯片每修改一次FEC的參數(shù)如FEC的symbol size, block size,content size等等都需要重新對芯片進(jìn)行代碼編譯和下載,每次下載需要幾分鐘的時間,由于不同的條件都要測試,則組合數(shù)量很多,導(dǎo)致測試效率非常低。
但是BSX系列誤碼儀的FEC功能能夠靈活實(shí)時的調(diào)節(jié)上述各種FEC的參數(shù),并且實(shí)時的更新經(jīng)過FEC后的誤碼率變化情況,而完全不需要重新下載芯片的代碼(如圖11和圖12)。大大的提高了測試和調(diào)試的效率,而且客戶也做過認(rèn)真的對比,誤碼儀對FEC后計(jì)算得到的誤碼率和其真實(shí)芯片經(jīng)過FEC的誤碼率是非常匹配的。這個功能使客戶之前幾天的時間進(jìn)行調(diào)試過程縮短到一天之內(nèi)完成,作為泰克工程師的我之前也沒有怎么用過這個功能,覺得它是個雞肋,當(dāng)現(xiàn)場看到客戶的調(diào)試過程后也是感嘆不已。
圖9:用戶的測試拓?fù)浣Y(jié)構(gòu)
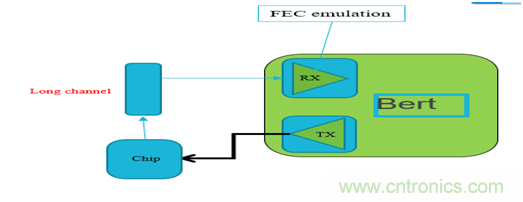
圖10:RS-FEC的設(shè)定,可以任意修改,即使生效。
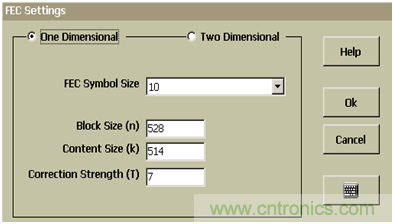
圖11:FEC的仿真功能,實(shí)時計(jì)算出FEC之前和之后的誤碼率的變化。

案例六:使用BSX的pattern sensitivity的功能定位誤碼出現(xiàn)的特定比特位.
在客戶進(jìn)行誤碼測試的時候,由于鏈路的損耗和芯片的輸出特性,導(dǎo)致出現(xiàn)了誤碼,但客戶卻想知道究竟是哪一個bit位出現(xiàn)了誤碼,以定位誤碼出現(xiàn)的根源。設(shè)置Bert的輸出/輸入端設(shè)置為PRBS7的碼型,在誤碼分析功能里面選擇Patten Sensitivity,則可以直接觀察PRBS7的127個比特的每一位所出現(xiàn)誤碼的個數(shù),看最多誤碼所對應(yīng)的比特位的前后特性,如下圖十三,移動光標(biāo)到任意一個比特上面,可以看到連續(xù)多個0而中間有一個1跳變的bit即127比特的第94比特出現(xiàn)誤碼的個數(shù)最多,達(dá)到5043598個誤碼。從而判斷由于鏈路ISI的影響導(dǎo)致突然的跳變位出現(xiàn)較高的誤碼率。
圖12:基于碼型系列的誤碼定位

從上述的用戶實(shí)際案例可以看出,Bertscope 的眼圖抖動和誤碼定位分析可以給客戶帶來很多調(diào)試的手段,把時域和誤碼極好的相關(guān)聯(lián)起來,幫用戶極大的提高了測試和調(diào)試的效率。
推薦閱讀:
推薦閱讀:



